
Jako kluczowy element umożliwiający osiągnięcie wydajności silników lotniczych, łopatki mają charakterystyczne cechy, takie jak cienkie ścianki, specjalne kształty, złożone konstrukcje, trudne do obróbki materiały oraz wysokie wymagania co do dokładności obróbki i jakości powierzchni. Jak osiągnąć dokładną i efektywną obróbkę łopatek jest jedną z głównych wyzwań w dzisiejszym procesie produkcji silników lotniczych. Przez analizę kluczowych czynników wpływających na dokładność obróbki łopatek, dokonano kompleksowego podsumowania bieżącego stanu badań nad technologiami i urządzeniami do precyzyjnej obróbki łopatek, a także zaprezentowano perspektywy rozwoju technologii obróbki łopatek dla silników lotniczych.
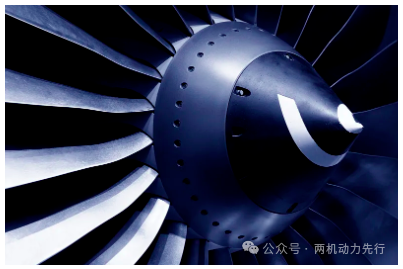
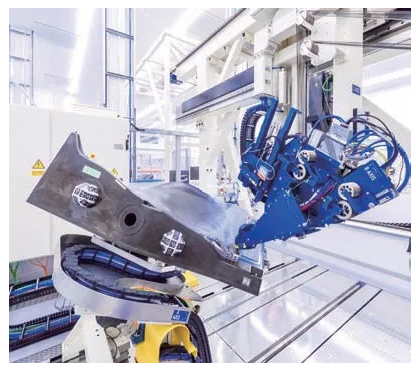
W przemyśle lotniczym powszechnie stosuje się lekkie, o wysokiej wytrzymałości, cienkie ścianki elementy, które są kluczowymi komponentami umożliwiającymi osiągnięcie wydajności ważnego sprzętu, takiego jak silniki samolotowe [1]. Na przykład, łopatki wentylatorowe z alianсу tytanowego w silnikach o dużym współczynniku obiegu (zobacz rysunek 1) mogą mieć długość do 1 metra, z złożonymi profilami łopatek i strukturą amortyzującą platformy, przy czym grubość najcieńszej części wynosi zaledwie 1,2 mm, co jest typowym przykładem dużego cienkościennego elementu o specjalnym kształcie [2]. Jako typowy cienkościennelement o specjalnym kształcie i słabej sztywności, łopatka podczas obróbki jest podatna na deformację i drgania [3]. Te problemy poważnie wpłyają na dokładność obróbki i jakość powierzchni łopatki.
Wydajność silnika zależy w dużej mierze od poziomu produkcji łopatek. Podczas pracy silnika łopatki muszą działać stabilnie w ekstremalnych warunkach eksploatacyjnych, takich jak wysoka temperatura i ciśnienie. To wymaga, aby materiał łopatek posiadał dobrą wytrzymałość, odporność na zmęczenie oraz odporność na korozyjne działanie przy wysokich temperaturach, a jednocześnie zapewniał stabilność strukturalną [2]. Zazwyczaj do łopatek silników turbinowych stosuje się alianse tytanowe lub wysokotemperaturowe. Jednakże, alianse tytanowe i wysokotemperaturowe mają niską obrabialność. W trakcie procesu cięcia siła cięcia jest duża, a narzędzie szybko się zużywa. W miarę wzrostu zużycia narzędzia siła cięcia zwiększa się dalej, co prowadzi do większej deformacji i drgań podczas obróbki, co spowoduje niską dokładność wymiarową i złe jakość powierzchni elementów. Aby spełnić wymagania dotyczące wydajności silnika w ekstremalnych warunkach pracy, dokładność obrabiania i jakość powierzchni łopatek są niezwykle wysokie. Weźmy na przykład łopatki wentylatorowe z aliansu tytanowego stosowane w krajowym silniku turbofanowym o wysokim współczynniku obejmu. Całkowita długość łopatki wynosi 681 mm, podczas gdy jej grubość jest mniejsza niż 6 mm. Wymaganie dotyczące konturu to -0,12 do +0,03 mm, dokładność wymiarowa krawędzi wpływu i wyjściowej wynosi -0,05 do +0,06 mm, a błąd skręcenia przekroju łopatki mieści się w granicach ± 10′, a wartość roughnessu powierzchni Ra jest lepsza niż 0.4 μ m. Zazwyczaj wymaga to precyzyjnej obróbki na narzędziu CNC z pięcioma osiami. Jednakże, ze względu na niewielką sztywność łopatki, złożoną strukturę i trudne do obróbki materiały, aby zagwarantować dokładność obróbki i jakość, personel procesowy musi wielokrotnie dostosowywać parametry cięcia podczas procesu obróbkowego, co poważnie ogranicza wydajność centrum CNC i powoduje ogromne straty efektywności [4]. Dlatego, wraz z szybkim rozwojem technologii CNC, jak osiągnąć kontrolę deformacji i tłumienie drgań podczas obróbki części cienkoscianowych oraz w pełni wykorzystać możliwości obróbkowe centrów CNC, stało się natychmiastową potrzebą dla zaawansowanych firm produkcyjnych.
Badania nad technologią kontroli deformacji cienkościennych części o niskiej sztywności przyciągnęły uwagę inżynierów i badaczy przez długi czas. W wczesnej praktyce produkcyjnej ludzie często stosowali strategię linii wodnej w postaci交替milenia z obu stron struktur cienkościennych, co do pewnego stopnia łatwo zmniejsza niepożądane wpływy deformacji i drgań na dokładność wymiarową. Ponadto istnieje również sposób polepszenia sztywności obróbki poprzez umieszczenie wstępnie zaprojektowanych struktur ofiarnych, takich jak wzmacniające żeberka.
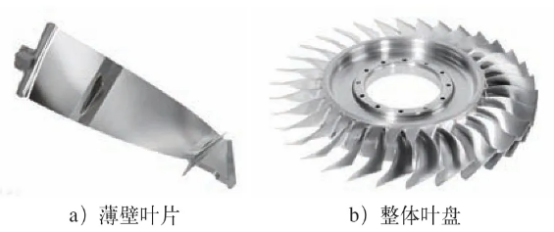
Aby spełnić wymagania stabilnej pracy w środowisku o wysokiej temperaturze i ciśnieniu, powszechnie stosowanymi materiałami dla łopatek silników lotniczych są legity titaniumowe lub wysokotemperaturowe. W ostatnich latach związek międ-titanowy stał się również materiałem łopatkowym o dużym potencjale zastosowań. Legity titaniumowe mają cechy takie jak niska przewodność cieplna, niska plastyczność, niski moduł sprężystości oraz silne powinowactwo, co sprawia, że podczas ich obrabiania występują problemy związane z dużą siłą tnącą, wysoką temperaturą tniecia, ciężkim utwardzeniem w pracy i dużym zużyciem narzędzi. Są to typowe trudne do obrabiania materiały (morfologia mikrostruktury zobacz rysunek 2a) [7]. Głównymi cechami wysokotemperaturowych stopów są wysoka plastyczność i wytrzymałość, słaba przewodność cieplna oraz duża ilość gęstej roztworu stałego w środkach [8]. Deformacja plastyczna podczas obróbki powoduje poważne zakrzywienie krystalicznej siatki, wysoki opór deformacji, dużą siłę tnącą i zjawisko intensywnego utwardzania chłodnym, co czyni je również typowymi trudnymi do obrabiania materiałami (morfologia mikrostruktury zobacz rysunek 2b). Dlatego rozwój efektywnej i precyzyjnej technologii obrabiania trudnych do obrabiania materiałów, takich jak legity titaniumowe i wysokotemperaturowe, jest bardzo ważny. Aby osiągnąć efektywne i precyzyjne obrabianie trudnych do obrabiania materiałów, krajowi i zagraniczni naukowcy przeprowadzili głębokie badania pod kątem innowacyjnych metod obrabiania, optymalnych materiałów narzędziowych oraz zoptymalizowanych parametrów obrabiania.
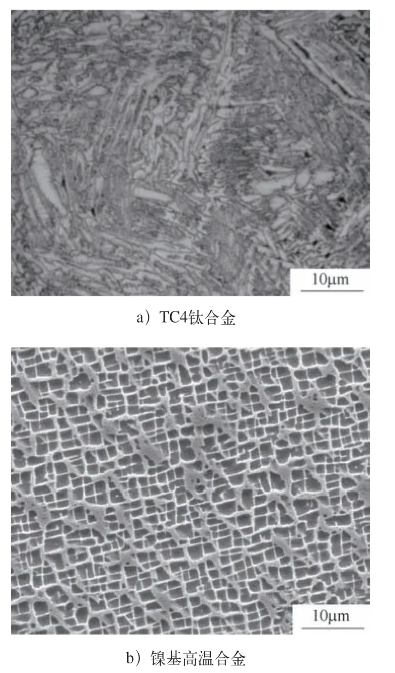
W zakresie innowacyjnych badań nad rozwojem metod cięcia, uczeni wprowadzili pomocnicze środki, takie jak nagrzewanie laserowe i chłodzenie kriogeniczne, aby poprawić spawalność materiałów i osiągnąć efektywne cięcie. Zasada działania procesu wspomaganego nagrzewaniem laserowym [9] (patrz rysunek 3a) polega na skupieniu promienia laserowego o dużej mocy na powierzchni roboczej przed ostrzem cięciem, co powoduje zmiękczenie materiału za pomocą lokalnego nagrzewania promieniem, obniżenie wytrzymałości plastycznej materiału, co z kolei redukuje siłę cięcia i zużycie narzędzia oraz poprawia jakość i efektywność cięcia. Proces wspomagany chłodzeniem kriogenicznym [10] (patrz rysunek 3b) wykorzystuje ciekły azot, gaz dwutlenek węgla pod wysokim ciśnieniem i inne środki chłodzące, które są spryskiwane na część cięcia, aby ochłodzić proces cięcia, uniknąć problemu zbyt wysokiej lokalnej temperatury cięcia spowodowanej niską przewodnością cieplną materiału oraz uczynić robocę lokalnie kruchą, co zwiększa efekt łamania ścinanego materiału. Firma Nuclear AMRC w Wielkiej Brytanii pomyślnie zastosowała gazowy dwutlenek węgla pod wysokim ciśnieniem do ochładzania procesu obróbki stopów tytanowych. W porównaniu z stanem suszonym, analiza pokazuje, że proces wspomagany chłodzeniem kriogenicznym nie tylko zmniejsza siłę cięcia i poprawia jakość powierzchni cięcia, ale również skutecznie zmniejsza zużycie narzędzi i zwiększa ich żywotność. Ponadto, obróbka wspomagana drganiami ultradźwiękowymi [11, 12] (patrz rysunek 3c) jest również skuteczną metodą efektywnego cięcia trudnych do obróbki materiałów. Stosując drgania o wysokiej częstotliwości i małej amplitudzie do narzędzia, osiąga się przerwy między narzędziem a robocą w trakcie procesu obróbkowego, co zmienia mechanizm usuwania materiału, wzmacnia stabilność dynamicznego cięcia, skutecznie unika tarcia między narzędziem a obrabianą powierzchnią, obniża temperaturę cięcia i siłę cięcia, zmniejsza wartości roughness powierzchni oraz zużycie narzędzi. Jego doskonałe efekty technologiczne spotkały się z szerokim zainteresowaniem.
Dla trudnych do obrabiania materiałów, takich jak stopy tytanu, optymalizacja materiałów narzędzi może skutecznie poprawić wyniki obróbki [8, 13]. Badania wykazały, że podczas obróbki stopów tytanu można wybierać różne narzędzia w zależności od prędkości obróbki. Dla niskich prędkości cięcia stosuje się stal szybkotną z wysokim zawartością kobaltu, dla średnich prędkości cięcia używane są narzędzia z twardym stopem metali z pokryciem tlenku glinu, a dla wysokich prędkości cięcia stosowane są narzędzia z nitretem boru kostnym (CBN); w przypadku obróbki stopów wysokotemperaturowych powinno się korzystać z stalowych narzędzi szybkotnych o wysokim zawartości wanadu lub twardych stopów YG o wysokiej twardości i dobrych właściwościach odporu na zużycie.
Parametry cięcia są również ważnym czynnikiem wpływającym na efekt obróbki. Użycie odpowiednich parametrów cięcia dla odpowiadających materiałów może skutecznie poprawić jakość i wydajność obróbki. Weźmy na przykład parametr prędkości cięcia: niska prędkość cięcia łatwo prowadzi do utworzenia strefy przywarłego krawędziowego na powierzchni materiału, co obniża dokładność obrabiania powierzchni; wysoka prędkość cięcia może łatwo spowodować nagromadzenie ciepła, co powoduje spalenia pracy i narzędzia. W tej sprawie zespół profesora Zhai Yuanshenga na Harbin University of Science and Technology analizował mechaniczne i fizyczne właściwości powszechnie używanych trudnych do obróbki materiałów i podsumował zalecany zestaw prędkości cięcia dla trudnych do obróbki materiałów za pomocą eksperymentów ortogonalnych w obróbce [14] (zobacz Tabelę 1). Użycie narzędzi i prędkości cięcia zalecanych w tabeli do obróbki może skutecznie zmniejszyć defekty obróbki i zużycie narzędzi, a także poprawić jakość obróbki.
W ostatnich latach, wraz z szybkim rozwijaniem się przemysłu lotniczego i rosnącym popytem rynkowym, wymagania dotyczące efektywnej i precyzyjnej obróbki cienkościennej łopatek stają się coraz większe, a potrzeba bardziej precyzyjnej technologii kontroli deformacji staje się coraz pilniejsza. W kontekście technologii inteligentnej produkcji, łącząc nowoczesną elektroniczną technologię informacyjną, aby osiągnąć inteligentne sterowanie deformacją i drganiem podczas obróbki łopatek silników lotniczych, stało się popularnym tematem dla wielu badaczy. Wprowadzenie inteligentnych systemów CNC do precyzyjnej obróbki złożonych powierzchni krzywoliniowych łopatek oraz aktywna kompensacja błędów w procesie obróbkowym na podstawie inteligentnych systemów CNC może skutecznie hamować deformację i drgania.
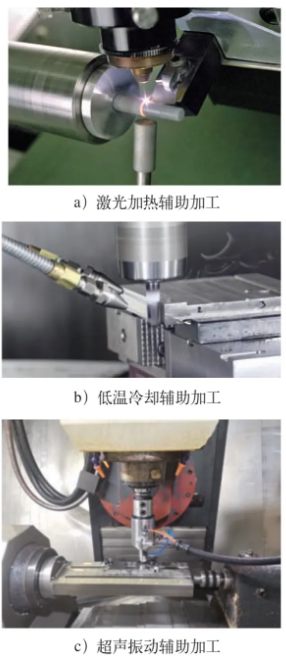
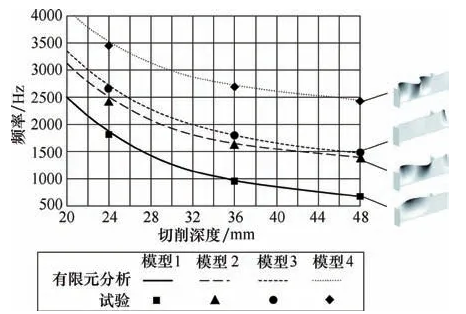
W celu kompensacji aktywnych błędów w procesie obróbki, aby osiągnąć optymalizację i kontrolę parametrów obróbki, takich jak ścieżka narzędzia, należy najpierw uzyskać informacje o wpływie parametrów technologicznych na deformację i drgania podczas obróbki. Istnieją dwie powszechnie stosowane metody: jedna polega na analizowaniu i wnioskowaniu wyników każdego przebiegu narzędzia za pomocą pomiarów na maszynie i analizy błędów [15]; druga to tworzenie modelu predykcyjnego dla deformacji i drgań podczas obróbki za pomocą metod takich jak analiza dynamiczna [16], modelowanie elementów skończonych [17], eksperymenty [18] i sieci neuronowe [19] (patrz rysunek 4).
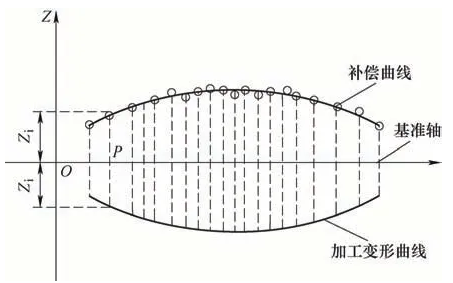
Na podstawie powyższego modelu przewidywania lub technologii pomiarów na maszynie, ludzie mogą optymalizować, a nawet kontrolować parametry obróbki w czasie rzeczywistym. Głównym kierunkiem jest kompensacja błędów spowodowanych deformacją i drganiami przez ponowne zaplanowanie trajektorii narzędzia. Powszechnie stosowaną metodą w tym kierunku jest "metoda kompensacji lustrzanej" [20] (patrz rysunek 5). Ta metoda kompensuje deformację pojedynczego cięcia przez poprawienie nominalnej trajektorii narzędzia. Jednak pojedyncza kompensacja może wywołać nową deformację obróbkową. Dlatego konieczne jest ustalenie iteracyjnego związku między siłą cięcia a deformacją obróbkową za pomocą wielokrotnych kompensacji, aby krok po kroku poprawić deformacje. Oprócz metody aktywnej kompensacji błędów opartej na planowaniu trajektorii narzędzi, wielu uczonych bada również, jak kontrolować deformację i drgania poprzez optymalizację i kontrolę parametrów cięcia i narzędzi. W przypadku cięcia określonego rodzaju łopatki silnika lotniczego przeprowadzono wiele serii ortogonalnych testów zmieniając parametry obróbki. Na podstawie danych z testów analizowano wpływ każdego parametru cięcia i narzędzia na deformację obróbkową łopatki i odpowiedź drganiową [21-23]. Ustanowiono empiryczny model przewidywania w celu optymalizacji parametrów obróbki, skutecznego zmniejszenia deformacji obróbkowej i tłumienia drgań przy cięciu.
Na podstawie wymienionych modeli i metod wiele firm rozwijało lub ulepszało układy CNC w centrach obróbkowych CNC, aby osiągnąć sterowanie adaptacyjne w czasie rzeczywistym parametrów obróbki cienkoscianowych elementów. Optymalny system frezarki firmy OMAT z Izraela [24] jest typowym przedstawicielem w tej dziedzinie. Głównie dostosowuje prędkość podawania za pomocą technologii adaptacyjnej, aby osiągnąć cel frezowania przy stałej sile oraz zapewnić wydajną i wysokiej jakości obróbkę złożonych produktów. Ponadto, Pekin Jingdiao zastosował podobną technologię w klasycznym przypadku technicznym, wykonującym wycinanie wzorów na powierzchni skorupki jajka dzięki adaptacyjnemu kompensowaniu pomiarów maszynowych [25]. THERRIEN z GE w Stanach Zjednoczonych [26] zaproponował metodę poprawek w czasie rzeczywistym kodów CNC podczas obróbki, co dostarczyło podstawowych środków technicznych do obróbki adaptacyjnej i sterowania w czasie rzeczywistym złożonych cienkoscianych łopatek. System automatycznej naprawy turbinowych elementów silników lotniczych (AROSATEC) Unii Europejskiej realizuje precyzyjne frezowanie adaptacyjne po naprawie łopatek metodami wytwarzania addytywnego i został już zastosowany w produkcji naprawiania łopatek przez niemiecką firmę MTU i irlandzką firmę SIFCO [27].
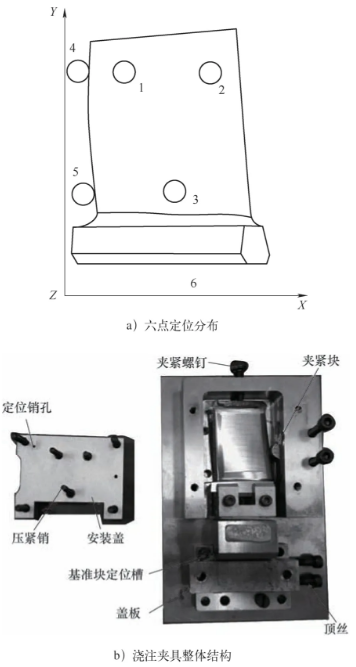
Użycie inteligentnego wyposażenia procesowego w celu poprawy sztywności układu procesowego i ulepszenia właściwości tłumienia jest również skutecznym sposobem na hamowanie deformacji i drgań podczas obróbki cienkościennej, poprawę dokładności obróbki oraz jakości powierzchni. W ostatnich latach zastosowano wiele różnych rodzajów wyposażenia procesowego do obróbki różnych rodzajów łopatek silników lotniczych [28]. Ponieważ łopatki silników lotniczych mają ogólne cechy konstrukcyjne, takie jak cienkie ścianki i nieregularny kształt, mała powierzchnia zacisku i lokalizacji, niska sztywność obróbki oraz lokalna deformacja pod wpływem obciążenia cięcia, wyposażenie do obróbki łopatek stosuje zazwyczaj pomocnicze wsparcie elementu roboczego na podstawie zasady sześciu punktów lokalizacji [29], aby zoptymalizować sztywność układu procesowego i ograniczyć deformację podczas obróbki. Cienkościenne i nieregularne powierzchnie krzywoliniowe stawiają dwa wymagania dotyczące lokalizacji i zacisku narzędzi: po pierwsze, siła zacisku lub kontaktowa siła narzędzia powinna być rozłożona jak najrówniej na powierzchni krzywej, aby uniknąć poważnej lokalnej deformacji elementu roboczego pod wpływem siły zacisku; po drugie, elementy lokalizacji, zacisku i pomocniczego wsparcia narzędzi muszą lepiej dopasowywać się do złożonej powierzchni krzywej elementu roboczego, generując jednostajną siłę kontaktową na każdym punkcie kontaktu. W odpowiedzi na te dwa wymagania, uczeni zaproponowali elastyczny system narzędzi. Elastyczne systemy narzędzi można podzielić na fazy zmiany elastycznych narzędzi i adaptacyjne elastyczne narzędzia. Narzędzia elastyczne fazowej zmiany wykorzystują zmiany sztywności i tłumienia przed i po zmianie fazy płynu: płyn w fazie ciekłej lub mobilnej ma niską sztywność i tłumienie, a może dostosowywać się do złożonej powierzchni krzywej elementu roboczego pod niskim ciśnieniem. Następnie płyn przechodzi w fazę stałą lub jest konsolidowany przez zewnętrzne siły, takie jak elektryczność/magnetyzm/ciepło, co znacznie poprawia sztywność i tłumienie, zapewniając tym samym jednolite i elastyczne wsparcie dla elementu roboczego oraz tłumiąc deformację i drgania.
Urządzenia procesowe w tradycyjnej technologii przetwarzania łopatek silników lotniczych wykorzystują materiały o zmianie fazowej, takie jak stopy o niskim punkcie topnienia, do wypełnienia wspomagającego podparcia. Innymi słowy, po zlokalizowaniu i zaciśnięciu półproduktu w sześciu punktach, referencja pozycyjna części jest wlewna w blok formujący za pomocą stopu o niskim punkcie topnienia, co zapewnia dodatkowe wsparcie dla części, a złożone punktowe lokalizowanie jest konwertowane na regularne powierzchniowe lokalizowanie, po czym przeprowadza się precyzyjne obróbki części do przetworzenia (zobacz Rysunek 6). Ta metoda procesowa ma oczywiste wady: konwersja referencji pozycyjnej prowadzi do obniżenia dokładności pozycjonowania; przygotowanie produkcyjne jest skomplikowane, a wlewanie i topienie stopów o niskim punkcie topnienia spowoduje również problemy związane z resztami i czyszczeniem na powierzchni części. W tym samym czasie warunki wlewania i topienia są również stosunkowo niekorzystne [30]. Aby rozwiązać powyższe defekty procesowe, powszechną metodą jest wprowadzenie struktury wielopunktowego wsparcia połączonej z materiałem o zmianie fazowej [31]. Górny koniec struktury wsparcia kontaktuje się z częścią do pozycjonowania, a dolny koniec jest zanurzony w komorze z low-melting-point alloy. Realizuje się elastyczne pomocnicze wsparcie oparte na właściwościach fazowych stopów o niskim punkcie topnienia. Choć wprowadzenie struktury wsparcia może uniknąć powierzchniowych defektów spowodowanych przez kontakt stopów o niskim punkcie topnienia z łopatkami, ze względu na ograniczenia wydajności materiałów fazowych, elastyczne wyposażenie fazowe nie może jednocześnie spełniać dwóch głównych wymagań – wysokiej sztywności i szybkiej reakcji – i trudno je zastosować w efektywnym produkcji automatyzowanej.
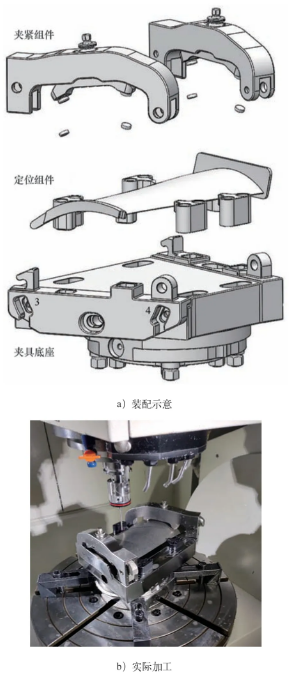
Aby rozwiązać wady narzędzi elastycznych opartych na zmianie fazy, wielu uczonych włączyło koncept adaptacji do badań i rozwoju narzędzi elastycznych. Narzędzia elastyczne z adaptacją mogą dopasowywać się do złożonych kształtów łopatek oraz możliwych błędów kształtu za pomocą systemów elektromechanicznych. Aby zapewnić, że siła kontaktowa jest równomiernie rozprowadzona na całej łopatce, narzędzia zwykle wykorzystują wspomaganie wielopunktowe, tworząc macierz podpór. Zespół Wang Hui z Uniwersytetu Tsinghua zaproponował urządzenie procesowe z wielopunktowym wsparciem elastycznym pomocniczym odpowiednim do obróbki bliskiej kształtnej łopatki [32, 33] (patrz Rysunek 7). Narzędzie używa wielu elementów chwytających z materiału elastycznego, aby wspierać powierzchnię łopatki bliskiej kształtnej, zwiększając powierzchnię kontaktową. każdy obszar kontaktowy oraz zapewnienie, że siła zacisku jest równomiernie rozłożona na każdej części kontaktowej i całej łopatce, co poprawia sztywność układu procesowego i skutecznie uniemożliwia lokalne deformacje łopatki. Narzędzia mają wiele pasywnych stopni swobody, które mogą adaptacyjnie dopasowywać się do kształtu łopatki i jej błędów, unikając nadmiernego pozycjonowania. Oprócz osiągnięcia adaptacyjnego wsparcia za pomocą materiałów elastycznych, zasada elektromagnetycznej indukcji jest również stosowana w badaniach nad rozwijaniem adaptacyjnych narzędzi elastycznych. Zespół Yang Yiqing z Pekińskiej Uniwersytetu Lotnictwa i Kosmonautyki wynalazł pomocnicze urządzenie wsparcia oparte na zasadzie elektromagnetycznej indukcji [34]. Narzędzie używa elastycznego wspomagającego wsparcia pobudzonego sygnałem elektromagnetycznym, które może zmieniać cechy tłumienia układu procesowego. W trakcie zaciskania pomocnicze wsparcie adaptacyjnie dopasowuje się do kształtu części roboczej pod wpływem magnesu trwałego. Podczas obróbki drgania wygenerowane przez część roboczą są przekazywane do pomocniczego wsparcia, a odwrotna siła elektromagnetyczna jest pobudzana według zasady elektromagnetycznej indukcji, co tłumi drgania przy obróbce cienkościennych części roboczych.
Obecnie, w trakcie projektowania wyposażenia procesowego, powszechnie stosuje się metody takie jak analiza elementów skończonych, algorytm genetyczny i inne w celu optymalizacji układu wielopunktowych wspomagających podpór [35]. Jednak wynik optymalizacji zazwyczaj może tylko zagwarantować minimalizację deformacji przetwarzania w jednym punkcie, nie gwarantując osiągnięcia tego samego efektu hamowania deformacji w innych częściach przetwarzania. W procesie przetwarzania łopatek, na tym samym maszynie wykonywana jest seria przebiegów narzędziowych, ale wymagania dotyczące zacisku dla różnych części mogą być różne i mogą nawet zmieniać się w czasie. Dla statycznego sposobu wspierania wielopunktowego, jeśli sztywność systemu procesowego zostanie poprawiona przez zwiększenie liczby pomocniczych podpór, po pierwsze, masa i objętość narzędzi zwiększy się, a po drugie, przestrzeń ruchu narzędzi będzie skompresowana. Jeśli pozycja pomocniczej podpory zostanie zresetowana podczas przetwarzania różnych części, proces przetwarzania nieuniknionie zostanie przerwany, co spowoduje obniżenie efektywności przetwarzania. Dlatego zaproponowano后续wyposażenie procesowe [36-38], które automatycznie dostosowuje układ podpór i siłę wsparcia online zgodnie z procesem przetwarzania. Wyposażenie procesowe (patrz Rysunek 8) może osiągnąć dynamiczne wsparcie dzięki współdziałaniu narzędzia i narzędzi na podstawie trajektorii narzędzia i zmian warunków pracy w procesie cięcia zależnym od czasu przed rozpoczęciem dowolnego procedury przetwarzania: najpierw przeniesienie pomocniczej podpory do pozycji sprzyjającej ograniczeniu bieżącej deformacji przetwarzania, aby obszar przetwarzania czynnik pracy jest aktywnie wspierany, podczas gdy pozostałe części pracy pozostają w miejscu z minimalnym kontaktem, co odpowiada zmieniającym się w czasie wymaganiom dotyczącego zaciskania w trakcie procesu przetwarzania.
Aby dalej wzmacniać zdolność adaptacyjnego wsparcia dynamicznego urządzenia procesowego, dopasować bardziej złożone wymagania dotyczące zacisku w trakcie obróbki oraz poprawić jakość i wydajność produkcji obróbki łopatek, pomocnicze wsparcie jest rozszerzane na grupę składającą się z wielu dynamicznych pomocniczych podpór. Każda dynamiczna pomocnicza podpora musi koordynować działania i automatycznie oraz szybko odbudowywać kontakt między grupą podpór a częścią roboczą zgodnie z czasowymi wymaganiami procesu produkcyjnego. Proces odbudowywania nie powinien zakłócać pozycjonowania całej części roboczej ani nie powinien powodować lokalnego przesunięcia lub drgań. Urządzenie procesowe oparte na tym konceptie nazywane jest samoodtwarzalnym zestawem imbirów [39], który ma zalety elastyczności, odnawialności i autonomii. Samoodtwarzalny zestaw imbirów może alokować wiele pomocniczych podpór do różnych pozycji na wspieranej powierzchni zgodnie z wymaganiami procesu produkcyjnego i może dostosowywać się do części roboczych o złożonym kształcie o dużym polu, jednocześnie zapewniając wystarczającą sztywność i eliminując nadmiarowe podpory. Sposób działania imbiru polega na tym, że kontroler wysyła instrukcje zgodnie z zaprogramowanym programem, a podstawa mobilna przyprowadza element podpory do docelowej pozycji zgodnie z instrukcjami. Element podpory dostosowuje się do lokalnej geometrii części roboczej, aby osiągnąć zgodne wsparcie. Charakterystyka dynamiczna (sztywność i tłumienie) strefy kontaktowej między pojedynczym elementem podpory a lokalną częścią roboczą może być kontrolowana przez zmianę parametrów elementu podpory (na przykład element podpory hydraulicznej zwykle zmienia ciśnienie hydrauliczne wejściowe, aby zmienić charakterystyki kontaktowe). Charakterystyka dynamiczna systemu procesowego powstaje w wyniku sprzężenia charakterystyki dynamicznej strefy kontaktowej między wieloma elementami podpory a częścią roboczą i zależy od parametrów każdego elementu podpory oraz układu grupy elementów podpory. Projekt schematu odbudowy wsparcia wielopunktowego samoodtwarzalnego zestawu imbirów musi uwzględniać następujące trzy problemy: dostosowanie do kształtu geometrycznego części roboczej, szybkie ponowne pozycjonowanie elementów podpory oraz koordynacja współpracy wielu punktów wsparcia [40]. Dlatego przy użyciu samoodtwarzalnego zestawu imbirów konieczne jest użycie kształtu części roboczej, cech obciążenia i naturalnych warunków brzegowych jako wejścia, aby rozwiązać układ wsparcia wielopunktowego i parametry wsparcia w różnych warunkach obróbki, zaplanować ścieżkę ruchu wsparcia wielopunktowego, wygenerować kod kontrolny z wyników rozwiązania i zaimportować go do kontrolera. Obecnie krajowi i zagraniczni uczeni przeprowadzili pewne badania i próby dotyczące samoodtwarzalnych zestawów imbirów. W zagranicy projekt EU SwarmItFIX opracował nowy, wysoko elastyczny samoodtwarzalny system imbirów [41], który używa zestawu mobilnych pomocniczych podpór, które mogą swobodnie poruszać się po stole roboczym i ponownie pozycjonować w czasie rzeczywistym, aby lepiej wspierać obrabiane elementy. Prototyp systemu SwarmItFIX został zrealizowany w ramach tego projektu (patrz rysunek 9a) i przetestowany na miejscu włoskiego producenta samolotów. W Chinach zespół Wang Hui z Uniwersytetu Tsinghua opracował stół wsparcia czteropunktowego zacisku, który może być kontrolowany w harmonii z maszyną narzędziową [42] (patrz rysunek 9b). Ten stół może wspierać belkę wychodzącą i automatycznie unikać narzędzia podczas precyzyjnej obróbki belki łopatki turbinowej. W trakcie obróbki czteropunktowe pomocnicze wsparcie współpracuje z centrum CNC do odtworzenia stanu kontaktu czteropunktowego zgodnie z pozycją ruchu narzędzia, co nie tylko unika zakłóceń między narzędziem a pomocniczym wsparciem, ale również gwarantuje efekt wsparcia.
W miarę jak rosną wymagania dotyczące stosunku ciągu do masy w projektowaniu silników lotniczych, liczba elementów jest stopniowo redukowana, a poziom naprężeń w elementach staje się coraz wyższy. Wydajność dwóch głównych tradycyjnych materiałów strukturalnych wysokotemperaturowych osiągnęła swój limit. W ostatnich latach nowe materiały na potrzeby łopatek silników lotniczych rozwijają się szybko, a coraz więcej wysoce wydajnych materiałów jest stosowanych do produkcji cienkościennej łopatek. Spośród nich, γ -stop TiAl[43] charakteryzuje się doskonałymi właściwościami, takimi jak wysoka wytrzymałość właściwa, odporność na wysokie temperatury i dobra odporność na utlenianie. Jednocześnie jego gęstość wynosi 3,9g/cm3, co stanowi tylko połowę gęstości stopów wysokotemperaturowych. W przyszłości ma ogromne potencjał jako łopatka w zakresie temperatur 700-800 ℃ . Pomimo γ -Zawoja TiAl ma doskonałe właściwości mechaniczne, jego wysoka twardość, niska przewodność cieplna, niska odporność na pękanie i duża kruchłość prowadzą do złej integralności powierzchniowej i niskiej precyzji γ -materiału TiAl podczas obróbki, co poważnie wpływa na czas użytkowania elementów. Dlatego badania nad obróbką γ -zawojów TiAl mają ważne teoretyczne znaczenie i wartość, a także są ważnym kierunkiem badań nad obecną technologią obróbki łopatek.
Łopatki silników lotniczych mają złożone powierzchnie krzywoliniowe i wymagają wysokiej dokładności kształtu. Obecnie ich precyzyjne obrabianie opiera się przede wszystkim na metodach geometrycznego adaptacyjnego obrabiania opartych na planowaniu ścieżek i rekonstrukcji modelu. Ta metoda może skutecznie zmniejszyć wpływ błędów spowodowanych pozycjonowaniem, zaciskaniem itp. na dokładność obrabiania łopatek. Wpływ. Jednakże, ze względu na niejednorodną grubość surowca w postaci półproduktu odlewniczego, głębokość wycinania w różnych obszarach narzędzia jest różna podczas procesu wycinania według zaplanowanej ścieżki, co wprowadza niepewne czynniki do procesu wycinania i wpływa na stabilność obróbki. W przyszłości, w trakcie procesu CNC adaptacyjnego obrabiania, zmiany rzeczywistego stanu obrabiania powinny być lepiej śledzone [44], co znacząco poprawi dokładność obrabiania złożonych powierzchni krzywoliniowych i umożliwi stworzenie metody adaptacyjnego obrabiania sterowanego w czasie rzeczywistym, która dostosowuje parametry wycinania na podstawie danych zwrotnych w czasie rzeczywistym.
Jako największy rodzaj części w silniku, wydajność produkcji łopatek bezpośrednio wpływa na ogólną wydajność produkcji silnika, a jakość produkcji łopatek直接影响 silnikowy wydajność i żywotność. Dlatego inteligentne precyzyjne obrabianie łopatek stało się kierunkiem rozwoju produkcji łopatek silnikowych na świecie dzisiaj. Badania i rozwój maszyn i wyposażenia technologicznego są kluczowe do zrealizowania inteligentnego obrabiania łopatek. Wraz z rozwojem technologii CNC poziom inteligencji maszyn wzrósł gwałtownie, a zdolność produkcyjna została znacznie zwiększone. Dlatego badania, rozwój i innowacje w zakresie inteligentnego wyposażenia technologicznego są ważnym kierunkiem rozwoju w obszarze efektywnego i precyzyjnego obrabiania cienkościennej łopatki. Wysoce inteligentne centra obróbkowe CNC łączą się z wyposażeniem technologicznym, tworząc system inteligentnego obrabiania łopatek (patrz rysunek 10), który realizuje precyzyjne, wydajne i adaptacyjne CNC obrabianie cienkościennej łopatki.
 Gorące Wiadomości
Gorące Wiadomości2024-12-31
2024-12-04
2024-12-03
2024-12-05
2024-11-27
2024-11-26
Nasz profesjonalny zespół sprzedaży czeka na Twoją konsultację.
 PL
PL
 EN
EN AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 SL
SL
 UK
UK
 VI
VI
 ET
ET
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 GA
GA
 IS
IS






