
В качестве ключевого компонента для достижения производительности авиадвигателей, лопасти имеют характерные особенности, такие как тонкостенные, специальной формы, сложные конструкции, труднообрабатываемые материалы и высокие требования к точности обработки и качеству поверхности. Как достичь точной и эффективной обработки лопастей является одной из главных задач в современной области производства авиадвигателей. Через анализ ключевых факторов, влияющих на точность обработки лопастей, делается всесторонний обзор текущего состояния исследований технологий и оборудования для точной обработки лопастей, а также прогнозируется направление развития технологий обработки лопастей авиадвигателей.
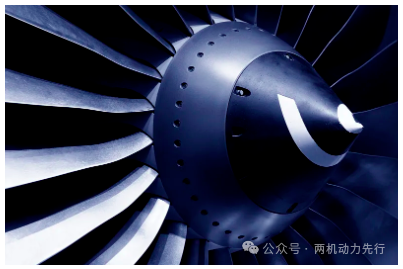
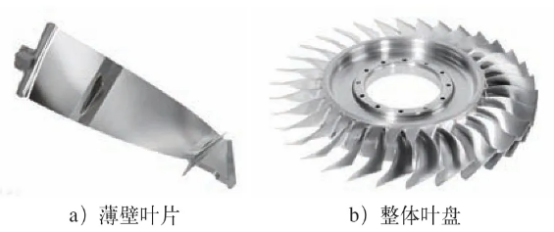
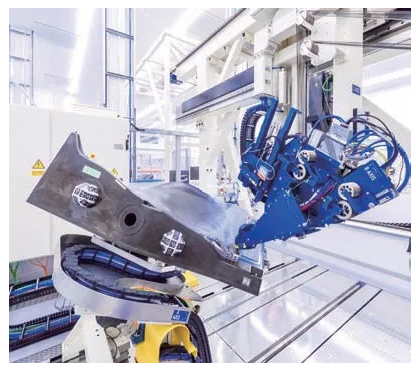
В авиакосмической промышленности широко используются легкие, высокопрочные тонкостенные детали, которые являются ключевыми компонентами для достижения характеристик важного оборудования, такого как авиадвигатели [1]. Например, титановые лопасти вентилятора больших авиадвигателей с большим коэффициентом обхода (см. рисунок 1) могут достигать длины до 1 метра, с сложными профилями лопастей и демпфирующими платформами, при этом толщина самого тонкого места составляет всего 1,2 мм, что является типичным примером крупногабаритной тонкостенной специальной формы [2]. Как типичная тонкостенная специальная форма с низкой жесткостью, лопасть подвержена деформации и вибрации во время обработки [3]. Эти проблемы серьезно влияют на точность обработки и качество поверхности лопасти.
Производительность двигателя в значительной степени зависит от уровня изготовления лопаток. Во время работы двигателя лопатки должны функционировать стабильно в экстремальных условиях высокой температуры и давления. Это требует, чтобы материал лопатки обладал хорошей прочностью, устойчивостью к усталости и коррозии при высоких температурах, а также обеспечивал структурную стабильность [2]. Обычно для лопаток авиадвигателей используют титановые сплавы или жаростойкие сплавы. Однако титановые сплавы и жаростойкие сплавы плохо обрабатываются. В процессе резания возникает большая сила резания, и инструмент быстро изнашивается. По мере увеличения износа инструмента сила резания将进一步 возрастать, что приведет к более серьезным деформациям и вибрациям при обработке, что вызовет низкую точность размеров и плохое качество поверхности деталей. Чтобы соответствовать требованиям к эксплуатационным характеристикам двигателя в экстремальных условиях работы, точность обработки и качество поверхности лопаток чрезвычайно высоки. Возьмем, к примеру, титановые лопасти вентилятора, используемые в отечественном высокообъемном турбовентиляторном двигателе: общая длина лопасти составляет 681 мм, при этом толщина менее 6 мм. Требования к профилю составляют -0,12 до +0,03 мм, точность размеров входного и выходного краев -0,05 до +0,06 мм, погрешность кручения сечения лопасти находится в пределах ± 10′, а значение шероховатости поверхности Ra лучше, чем 0.4 μ м. Обычно это требует точной обработки на пятиосевом ЧПУ-станке. Однако, из-за низкой жесткости лопасти, сложной структуры и труднообрабатываемых материалов, для обеспечения точности обработки и качества персонал вынужден многократно корректировать параметры резания во время процесса, что существенно ограничивает производительность центра ЧПУ и вызывает огромные потери эффективности [4]. Таким образом, с быстрым развитием технологии ЧПУ-обработки, как достичь контроля деформации и подавления вибрации при обработке тонкостенных деталей и максимально использовать возможности станков с ЧПУ стало насущной необходимостью для передовых компаний по производству.
Исследование технологии контроля деформации тонкостенных элементов с низкой жесткостью привлекало внимание инженеров и исследователей на протяжении долгого времени. На раннем этапе производственной практики часто применялась стратегия водной линии с чередующимся фрезерованием с обеих сторон тонкостенных конструкций, что в определенной степени способствует уменьшению негативного влияния деформации и вибрации на размерную точность. Помимо этого, существует также метод повышения обрабатываемой жесткости за счет установки предварительно изготовленных жертвенных конструкций, таких как ребра жесткости.
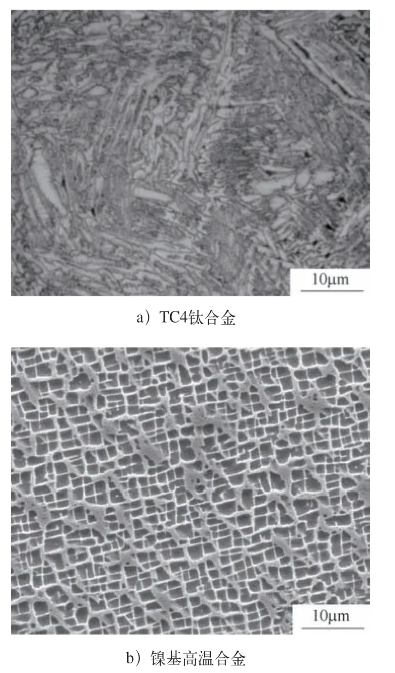
Чтобы соответствовать требованиям стабильной работы в условиях высокой температуры и высокого давления, часто используемыми материалами для лопастей авиадвигателей являются титановые сплавы или высокотемпературные сплавы. В последние годы межметаллические соединения титана и алюминия также стали материалом для лопастей с большим потенциалом применения. Титановые сплавы обладают характеристиками низкой теплопроводности, низкой пластичности, низкого упругого модуля и сильной аффинности, что делает их проблемными при резании из-за большой силы резания, высокой температуры резания, серьезного упрочнения и большого износа инструмента. Это типичные труднообрабатываемые материалы (структура микроморфологии см. Рисунок 2a) [7]. Основные характеристики высокотемпературных сплавов — это высокая пластичность и прочность, плохая теплопроводность и большое количество плотных твердых растворов внутри [8]. Пластическая деформация во время резания вызывает значительное искажение решетки, высокое сопротивление деформации, большую силу резания и серьезное явление холодного упрочнения, что также относит их к типичным труднообрабатываемым материалам (структура микроморфологии см. Рисунок 2b). Таким образом, разработка эффективных и точных технологий резания для труднообрабатываемых материалов, таких как титановые и высокотемпературные сплавы, имеет большое значение. Для достижения эффективного и точного механического обработки труднообрабатываемых материалов отечественные и зарубежные ученые провели глубокие исследования с точки зрения инновационных методов резания, оптимальных материалов режущего инструмента и оптимизированных параметров резания.
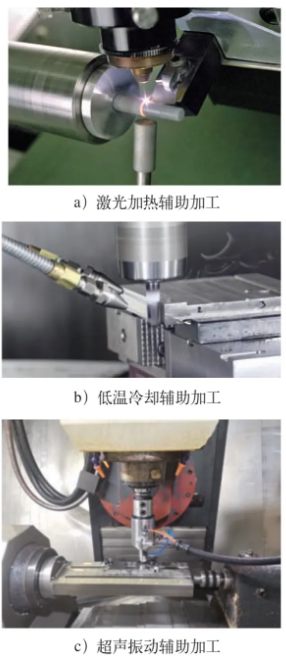
В области инновационных исследований и разработок методов резания ученые представили вспомогательные средства, такие как лазерный нагрев и криогенное охлаждение, для улучшения обрабатываемости материалов и достижения эффективного резания. Принцип работы лазерного нагрева с ассистированием [9] (см. рисунок 3a) заключается в фокусировке высокоэнергетического лазерного пучка на поверхности заготовки перед режущим краем, что приводит к размягчению материала за счет локального нагрева пучком, снижению предела текучести материала, соответственно уменьшению силы резания и износа инструмента, а также повышению качества и эффективности резания. Криогенное охлаждение с ассистированием [10] (см. рисунок 3b) использует жидкий азот, высокодавленный углекислый газ и другие охлаждающие среды, которые распыляются на место резания для охлаждения процесса резания, предотвращая проблему чрезмерной температуры локального резания, вызванной плохой теплопроводностью материала, и делая заготовку локально хрупкой, что усиливает эффект разрушения стружки. Компания Nuclear AMRC Великобритании успешно применила высокодавленный углекислый газ для охлаждения процесса обработки титанового сплава. Сравнение показывает, что криогенное охлаждение с ассистированием не только снижает силу резания и улучшает качество поверхности резания, но и эффективно уменьшает износ инструмента, увеличивая его срок службы. Кроме того, ультразвуковая вибрационная обработка с ассистированием [11, 12] (см. рисунок 3c) также является эффективным методом для высокоэффективного резания труднообрабатываемых материалов. Применение высокочастотных колебаний малой амплитуды к инструменту обеспечивает периодическое разделение между инструментом и заготовкой во время обработки, что изменяет механизм удаления материала, усиливает стабильность динамического резания, эффективно предотвращает трение между инструментом и обрабатываемой поверхностью, снижает температуру резания и силу резания, уменьшает значения шероховатости поверхности и износ инструмента. Его отличные технологические эффекты получили широкое внимание.
Для труднообрабатываемых материалов, таких как титановые сплавы, оптимизация материалов инструмента может эффективно улучшить результаты резания [8, 13]. Исследования показали, что при обработке титановых сплавов можно выбирать разные инструменты в зависимости от скорости обработки. При низкоскоростной обработке используется высокоскоростная сталь с высоким содержанием кобальта, при среднескоростной обработке используются твердосплавные инструменты с оксидом алюминия, а при высокоскоростной обработке применяются инструменты из кубического боразона (CBN); для обработки высокотемпературных сплавов следует использовать высокоскоростную сталь с высоким содержанием ванадия или твердосплавные инструменты YG с высокой твердостью и хорошей износостойкостью.
Параметры резания также являются важным фактором, влияющим на результат обработки. Использование подходящих параметров резания для соответствующих материалов может эффективно повысить качество и производительность обработки. Возьмем, к примеру, параметр скорости резания: низкая скорость резания может легко привести к образованию зоны прилипания на поверхности материала, снижая точность обработки поверхности; высокая скорость резания может легко вызвать накопление тепла, что приводит к прожогам заготовки и инструмента. В этой связи команда профессора Чжай Юаньшэня из Харбинского университета науки и технологий проанализировала механические и физические свойства часто используемых труднообрабатываемых материалов и составила рекомендательную таблицу скоростей резания для труднообрабатываемых материалов через ортогональные эксперименты по обработке [14] (см. Таблицу 1). Использование инструментов и скоростей резания, рекомендуемых в таблице, может эффективно снизить дефекты обработки и износ инструмента, а также улучшить качество обработки.
В последние годы, с быстрым развитием авиационной промышленности и ростом рыночного спроса, требования к эффективной и точной обработке тонкостенных лопастей постоянно увеличиваются, а потребность в более точной технологии контроля деформации становится более актуальной. В контексте технологий интеллектуального производства, сочетание современных электронных информационных технологий для достижения интеллектуального контроля деформации и вибрации при обработке лопастей авиадвигателей стало горячей темой для многих исследователей. Внедрение интеллектуальных систем CNC в точную обработку сложных криволинейных поверхностей лопастей и активная компенсация ошибок в процессе обработки на основе интеллектуальных систем CNC может эффективно подавлять деформацию и вибрацию.
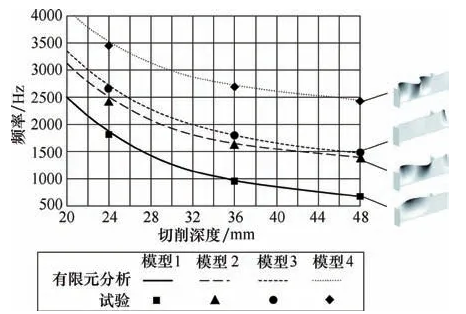
Для активной компенсации ошибок в процессе обработки, с целью оптимизации и управления параметрами обработки, такими как траектория инструмента, необходимо сначала получить влияние технологических параметров на деформацию и вибрацию при обработке. Существует два часто используемых метода: один заключается в анализе и выведении результатов каждого прохода инструмента через измерения на станке и анализ ошибок [15]; другой — это создание прогнозной модели для деформации и вибрации при обработке с использованием методов, таких как динамический анализ [16], моделирование конечных элементов [17], эксперименты [18] и нейронные сети [19] (см. рисунок 4).
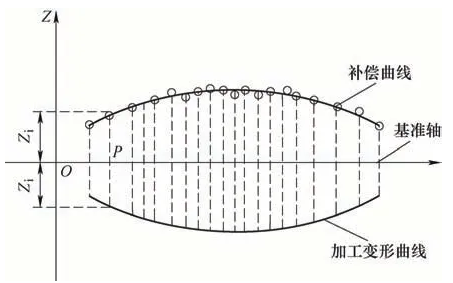
На основе вышеуказанной модели прогнозирования или технологии измерения на машине люди могут оптимизировать и даже контролировать параметры обработки в реальном времени. Главное направление заключается в компенсации ошибок, вызванных деформацией и вибрацией, путем перепланирования траектории инструмента. Распространенным методом в этом направлении является "метод зеркальной компенсации" [20] (см. рисунок 5). Этот метод компенсирует деформацию при одиночной резке за счет корректировки номинальной траектории инструмента. Однако однократная компенсация может вызвать новую деформацию обработки. Следовательно, необходимо установить итерационную связь между силой резания и деформацией обработки через несколько компенсаций для поэтапной коррекции деформаций. Помимо метода активной компенсации ошибок на основе планирования траектории инструмента, многие ученые также исследуют способы контроля деформации и вибрации путем оптимизации и управления параметрами резания и инструмента. Для резки определенного типа лопасти авиадвигателя были проведены многочисленные ортогональные испытания с изменением параметров обработки. На основе данных испытаний был проанализирован влияние каждого параметра резания и параметра инструмента на деформацию обработки лопасти и вибрационный отклик [21-23]. Была создана эмпирическая модель прогнозирования для оптимизации параметров обработки, эффективного снижения деформации обработки и подавления вибрации при резании.
На основе указанных моделей и методов многие компании разработали или улучшили системы ЧПУ центров обработки с ЧПУ для достижения адаптивного реального времени управления параметрами обработки тонкостенных деталей. Оптимальная фрезерная система израильской компании OMAT [24] является типичным представителем в этой области. Она главным образом регулирует подачу скорости через адаптивные технологии для достижения цели постоянной силовой фрезеровки и реализации высокоэффективной и качественной обработки сложных изделий. Кроме того, компания Beijing Jingdiao применила аналогичную технологию в классическом техническом случае выполнения гравировки поверхности яичной скорлупы через адаптивную компенсацию на машине измерения [25]. ТЕРРИЕН из GE в США [26] предложил метод реального времени корректировки кодов ЧПУ во время обработки, что предоставило базовое техническое средство для адаптивной обработки и реального времени контроля сложных тонкостенных лопастей. Автоматизированная система ремонта турбинных компонентов авиадвигателя (AROSATEC) Европейского Союза осуществляет адаптивную точную фрезеровку после восстановления лопасти дополнительным производством, и уже применяется в производстве ремонта лопастей компаний MTU Германии и SIFCO Ирландии [27].
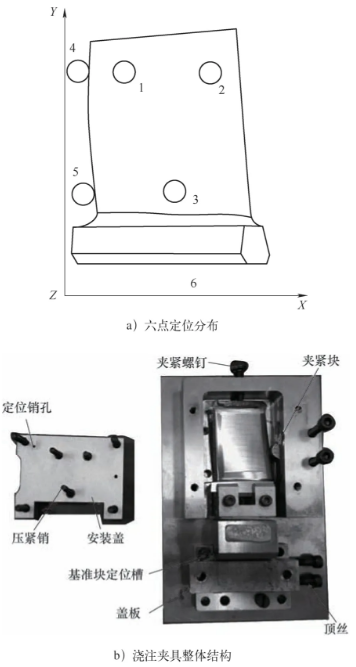
Использование интеллектуального технологического оборудования для повышения жесткости системы обработки и улучшения амортизационных характеристик также является эффективным способом подавления деформации и вибрации при обработке тонкостенных лопаток, повышения точности обработки и качества поверхности. В последние годы было применено большое количество различного технологического оборудования для обработки различных типов авиадвигательных лопаток [28]. Поскольку авиадвигательные лопатки обычно имеют тонкостенные и нерегулярные структурные характеристики, малую площадь зажима и позиционирования, низкую жесткость обработки и местную деформацию под действием резцовых нагрузок, технологическое оборудование для обработки лопаток обычно применяет дополнительную опору к детали на основе принципа шеститочечного позиционирования [29] для оптимизации жесткости системы обработки и подавления деформации при обработке. Тонкостенные и нерегулярные криволинейные поверхности предъявляют два требования к позиционированию и зажиму оснастки: во-первых, сила зажима или контактная сила оснастки должна быть распределена как можно более равномерно по криволинейной поверхности, чтобы избежать серьезной локальной деформации детали под действием силы зажима; во-вторых, элементы позиционирования, зажима и дополнительной опоры оснастки должны лучше соответствовать сложной криволинейной поверхности детали, создавая равномерное контактное усилие на каждой точке контакта. Для удовлетворения этих двух требований ученые предложили гибкую систему оснастки. Гибкие системы оснастки можно разделить на фазовые гибкие оснастки и адаптивные гибкие оснастки. Фазовые гибкие оснастки используют изменения жесткости и демпфирования до и после фазового перехода жидкости: жидкость в жидкой фазе или мобильной фазе имеет низкую жесткость и демпфирование, и может адаптироваться к сложной криволинейной поверхности детали под низким давлением. Затем жидкость преобразуется в твердую фазу или консолидируется внешними силами, такими как электричество/магнетизм/тепло, и значительно увеличивается жесткость и демпфирование, тем самым обеспечивая равномерную и гибкую поддержку детали и подавляя деформацию и вибрацию.
Оборудование для обработки в традиционной технологии изготовления лопаток авиадвигателя использует материалы с фазовыми переходами, такие как сплавы с низкой температурой плавления, для заполнения вспомогательной поддержки. То есть, после того как заготовка детали закреплена и зафиксирована в шести точках, опорная поверхность детали отливается в блок при помощи сплава с низкой температурой плавления для обеспечения дополнительной поддержки детали, а сложное точечное позиционирование преобразуется в регулярное позиционирование по поверхности, после чего проводится точная обработка обрабатываемой части (см. рисунок 6). Этот метод обработки имеет явные недостатки: преобразование опорной поверхности приводит к снижению точности позиционирования; подготовка производства усложняется, а также возникают проблемы очистки и остатков на поверхности детали из-за отливания и плавления сплава с низкой температурой плавления. При этом условия отливания и плавления также относительно плохие [30]. Для устранения указанных технологических недостатков часто применяется метод введения многоточечной опорной структуры, комбинированной с материалом с фазовым переходом [31]. Верхний конец опорной структуры контактирует с деталью для позиционирования, а нижний погружён в камеру со сплавом низкой температуры плавления. Гибкая вспомогательная поддержка достигается благодаря свойствам фазового перехода сплава с низкой температурой плавления. Хотя применение опорной структуры позволяет избежать поверхностных дефектов, вызванных контактом сплавов низкой температуры плавления с лопатками, из-за ограничений характеристик материалов с фазовыми переходами, гибкие приспособления с фазовыми переходами не могут одновременно удовлетворять двум важным требованиям — высокой жёсткости и высокой скорости реакции, что затрудняет их использование в высокоэффективном автоматическом производстве.
Для решения недостатков гибкой оснастки с фазовым переходом многие учёные включили концепцию адаптации в разработку гибкой оснастки. Адаптивная гибкая оснастка может адаптивно соответствовать сложным формам лопастей и возможным ошибкам формы через электромеханические системы. Для обеспечения равномерного распределения контактной силы по всей лопасти оснастка обычно использует многоточечные вспомогательные опоры для создания матрицы поддержки. Команда Ван Хуя из Пекинского университета предложила многоточечное гибкое вспомогательное оборудование для обработки близких к чистовой форме лопастей [32, 33] (см. рисунок 7). Оснастка использует несколько гибких зажимных элементов для поддержки поверхности лопасти близкой к чистовой форме, увеличивая площадь контакта. каждая контактная зона и обеспечение равномерного распределения силы зажима на каждой контактной части и по всей длине лопасти, что повышает жесткость системы обработки и эффективно предотвращает местную деформацию лопасти. Инструмент имеет несколько пассивных степеней свободы, которые могут адаптивно соответствовать форме лопасти и ее отклонениям, избегая чрезмерной фиксации. Помимо достижения адаптивной поддержки через гибкие материалы, принцип электромагнитной индукции также применяется в разработке адаптивного гибкого инструмента. Команда Янга Ицина из Пекинского университета авиакосмической техники изобрела вспомогательное устройство поддержки на основе принципа электромагнитной индукции [34]. Инструмент использует гибкую вспомогательную опору, возбуждаемую электромагнитным сигналом, которая может изменять амортизационные характеристики системы обработки. В процессе зажима вспомогательная опора адаптивно соответствует форме заготовки под действием постоянного магнита. Во время обработки вибрация, вызванная заготовкой, передается на вспомогательную опору, и согласно принципу электромагнитной индукции возбуждается обратная электромагнитная сила, подавляющая вибрацию при обработке тонкостенных заготовок.
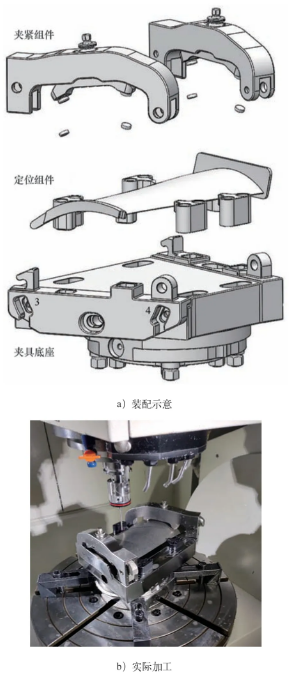
На данный момент, в процессе проектирования технологического оборудования обычно используются методы конечных элементов, генетический алгоритм и другие для оптимизации размещения многоточечных вспомогательных опор [35]. Однако результат оптимизации обычно может только обеспечить минимизацию деформации обработки в одной точке, не гарантируя достижение того же эффекта подавления деформации в других обрабатываемых частях. В процессе обработки лопаток обычно выполняется серия проходов инструмента по заготовке на одном и том же станке, но требования к зажиму при обработке разных участков различны и могут даже меняться со временем. Для статического многоточечного метода опор, если жесткость технологической системы повышается за счет увеличения числа вспомогательных опор, с одной стороны, увеличивается масса и объем оснастки, а с другой стороны, сжимается пространство движения инструмента. Если позиция вспомогательной опоры перенастраивается при обработке разных участков, это неизбежно приведет к прерыванию процесса обработки и снижению эффективности обработки. Поэтому были предложены адаптивные технологические средства [36-38], которые автоматически регулируют размещение опор и силу поддержки в режиме реального времени в соответствии с процессом обработки. Адаптивное технологическое оборудование (см. рисунок 8) может обеспечивать динамическую поддержку через координированное взаимодействие инструмента и оснастки на основе траектории инструмента и изменений условий работы во временно изменяющемся процессе резания до начала любой операции обработки: сначала перемещая вспомогательную опору в положение, которое способствует подавлению текущей деформации обработки, чтобы область обработки обрабатываемый элемент активно поддерживается, в то время как другие части заготовки остаются на месте с минимальным контактом, тем самым соответствующим временным требованиям к зажиму во время обработки.
Для дальнейшего повышения адаптивной динамической способности поддержки технологического оборудования, соответствия более сложным требованиям к зажиму в процессе обработки и улучшения качества и эффективности производства обработки лопастей, дополнительная поддержка расширяется до группы, состоящей из нескольких динамических вспомогательных опор. Каждая динамическая вспомогательная опора должна координировать действия и автоматически быстро восстанавливать контакт между группой опор и заготовкой в соответствии с временно изменяющимися требованиями производственного процесса. Процесс восстановления не должен нарушать позиционирование всей заготовки и не вызывать локального перемещения или вибрации. Оборудование, основанное на этой концепции, называется самоадаптируемым групповым фиксатором [39], который обладает преимуществами гибкости, перенастраиваемости и автономности. Самоадаптируемый групповой фиксатор может распределять несколько вспомогательных опор по разным позициям на поверхности поддержки в соответствии с требованиями производственного процесса и может адаптироваться к сложным заготовкам большой площади, при этом обеспечивая достаточную жесткость и исключая избыточные опоры. Способ работы фиксатора заключается в том, что контроллер отправляет команды согласно запрограммированной программе, а мобильная база перемещает элемент опоры к целевому положению согласно инструкциям. Элемент опоры адаптируется к локальной геометрической форме заготовки для достижения соответствующей поддержки. Динамические характеристики (жесткость и демпфирование) области контакта между одной опорой и локальной частью заготовки могут быть контролируемы путем изменения параметров элемента опоры (например, гидравлический элемент опоры обычно может менять входное гидравлическое давление для изменения характеристик контакта). Динамические характеристики системы обработки формируются за счет взаимодействия динамических характеристик области контакта между несколькими элементами опоры и заготовкой и связаны с параметрами каждого элемента опоры и расположением группы опор. При проектировании многоточечной схемы перестроения самоперенастраиваемого группового фиксатора необходимо учитывать три вопроса: соответствие геометрической форме заготовки, быстрое переопределение элементов опоры и координированное взаимодействие нескольких точек опоры [40]. Поэтому при использовании самоперенастраиваемого группового фиксатора необходимо использовать форму заготовки, характеристики нагрузки и присущие граничные условия как входные данные для решения задачи многоточечного расположения опор и параметров опор при различных условиях обработки, планирования траектории движения многоточечной поддержки, генерации управляющего кода из результатов решения и импорта его в контроллер. На данный момент отечественные и зарубежные ученые провели некоторые исследования и попытки в области самоперенастраиваемых групповых фиксаторов. За рубежом проект EU SwarmItFIX разработал новую высокоадаптивную систему самоперенастраиваемого фиксатора [41], которая использует набор мобильных вспомогательных опор для свободного перемещения по столу и реального времени переопределения для лучшей поддержки обрабатываемых деталей. Прототип системы SwarmItFIX был реализован в рамках этого проекта (см. рисунок 9a) и протестирован на площадке итальянского авиационного производителя. В Китае команда Ван Хуэй из Университета Цинхуа разработала четырехточечный рабочий стол для зажимной поддержки, который может координироваться с станком [42] (см. рисунок 9b). Этот стол может поддерживать выступающий шип и автоматически избегать инструмента во время финишной обработки шипа турбинной лопасти. Во время обработки четырехточечная вспомогательная поддержка сотрудничает с ЧПУ-центром обработки для восстановления четырехточечного состояния контакта в зависимости от положения движения инструмента, что не только предотвращает помехи между инструментом и вспомогательной поддержкой, но и обеспечивает эффект поддержки.
По мере того как требования к соотношению тяги к весу в авиадвигателях продолжают расти, количество деталей постепенно уменьшается, а уровень напряжений в деталях становится всё выше и выше. Характеристики двух основных традиционных высокотемпературных структурных материалов достигли своего предела. В последние годы новые материалы для лопастей авиадвигателей развивались стремительно, и всё больше высокоэффективных материалов используется для производства тонкостенных лопастей. Среди них γ -TiAl сплав [43] обладает отличными свойствами, такими как высокая удельная прочность, устойчивость к высоким температурам и хорошая сопротивляемость окислению. При этом его плотность составляет 3.9г/см3, что составляет всего половину от плотности высокотемпературных сплавов. В будущем он имеет большой потенциал как материал для лопастей в температурном диапазоне 700-800 ℃ . Хотя γ -Сплав TiAl обладает отличными механическими свойствами, его высокая твердость, низкая теплопроводность, низкая вязкость при растрескивании и высокая хрупкость приводят к плохой целостности поверхности и низкой точности γ -материала TiAl во время резания, что серьезно влияет на срок службы деталей. Поэтому исследование обработки γ -сплава TiAl имеет важное теоретическое значение и ценность, и является важным направлением исследования современных технологий обработки лопастей.
Лопатки авиадвигателя имеют сложные криволинейные поверхности и требуют высокой точности формы. В настоящее время их точная обработка в основном осуществляется с использованием геометрических адаптивных методов обработки, основанных на планировании траектории и реконструкции модели. Этот метод может эффективно снижать влияние ошибок, вызванных позиционированием, зажимом и т.д., на точность обработки лопаток. Однако из-за неравномерной толщины заготовки штампованной лопатки глубина резания в разных областях инструмента различна во время процесса резания согласно запланированной траектории, что вносит неопределенные факторы в процесс резания и влияет на стабильность обработки. В будущем, во время процесса ЧПУ адаптивной обработки, необходимо лучше отслеживать изменения реального состояния обработки [44], что значительно повысит точность обработки сложных криволинейных поверхностей и сформирует метод временно-вариационного управления адаптивной обработкой, который корректирует параметры резания на основе данных реального времени.
Как крупнейший тип деталей в двигателе, производственная эффективность лопаток напрямую влияет на общую производительность двигателя, а качество изготовления лопаток напрямую влияет на характеристики и срок службы двигателя. Поэтому интеллектуальная точная обработка лопаток стала направлением развития производства лопастей двигателей во всем мире сегодня. Разработка станков и технологического оборудования является ключом к реализации умной обработки лопаток. С развитием технологии ЧПУ уровень интеллекта станков быстро увеличился, а способность обработки и производства значительно возросла. Таким образом, исследование и разработка инновационного интеллектуального технологического оборудования является важным направлением для эффективной и точной обработки тонкостенных лопаток. Высокоинтеллектуальные станки с ЧПУ в сочетании с технологическим оборудованием образуют систему интеллектуальной обработки лопастей (см. рисунок 10), которая обеспечивает высокоточную, высокоэффективную и адаптивную обработку на станках с ЧПУ для тонкостенных лопаток.
 Горячие новости
Горячие новости2024-12-31
2024-12-04
2024-12-03
2024-12-05
2024-11-27
2024-11-26
Наша профессиональная команда по продажам ждет вашей консультации.
 EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 SL
SL
 UK
UK
 VI
VI
 ET
ET
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 GA
GA
 IS
IS






