
Kui oluline osa turbinimootorite jõudluse saavutamisel, siis on lehed omenduses tippsed omadused nagu üksteisele lähedased värised, eripärast kujundust, keerulised konstruktsioonid, rasked töödelda materjalid ja kõrge nõue töötlemise täpsuse ja pindlaadi suhtes. Kuidas saavutada lehedade täpne ja tõhus töötlemine, on praeguses turbomootorite tootmismeeskojas suur väljakutse. Töötlevates peamisi tegureid, mis mõjutavad lehedade töötlemistäpsust, on kokkuvõetud praegune otsuste olek lehedade täpsete töötlemistechnoloogiate ja seadmete kohta ning progeeritakse turbomootorite lehedade töötlemistechnoloogia arengusuundumusi.
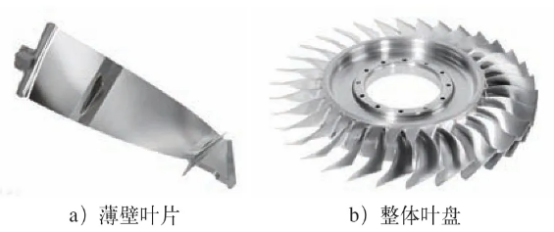
Lennu- ja kosmosektoris kasutatakse laialdaselt kehvakaalulisi, kõrge jõulisusega tipunärged osi, mis on olulised komponendid tähtsate seadmete, nagu lennukute mootorite, jõudluse saavutamiseks [1]. Näiteks suure läbimisnäitaja lennukute mootorite titaanligavaatlused (vt joonistust 1) võivad olla kuni 1 meetri pikkused, neil on keeruline profiil ja amorteerimisplaadide struktuur ning tipu kaigus on ainult 1,2 mm, mis teeb selle tipunärgelise osa tipuvormi ja -profiili [2]. Kui tipunärgeline erikujuline nõrga jõulisusega osa, siis veerel võib töötlemisel ilmunud deformatsioon ja vibratsioonid märkimisväärselt mõjutada töötlemise täpsust ja pinnakvaliteeti [3]. Need probleemid mõjutavad tõsiselt veere töötlemisega seotud täpsust ja pindade kvaliteeti.
Mootori jõudlus sõltub suurel määral lattade tootmiskvaliteetist. Mootori töötamise ajal peavad latad stabiilselt töötama äärmuslike operaatsioonilingi keskkondades, nagu on kõrge temperatuur ja kõrge rööp. See nõuab, et latta materjalil oleks hea jõud, väsimuse vastupidavus ja kõrgtemperatuuri korroosioonivastupidavus ning struktuuri stabiilsus tagatakse [2]. Tavaliselt kasutatakse lendesõiduki mootori latade jaoks tiitliitmeid või kõrgtemperatuuri liite. Kuid tiitliitmed ja kõrgtemperatuuri liitmed on halb töötlemiskesda. Lõigamise protsessi ajal on lõikuv jõud suur ja tööriist kulub kiiresti. Kui tööriisti kulamine suureneb, suureneb ka lõikuv jõud, mis põhjustab tõsisemaid töötlemisdeformatsioone ja vibratsioone, mis omakorda viib osade mõõtude madala täpsusele ja puudusale pinnakvaliteedile. Et rahuldada mootori teeninduskvaliteediga äärmuslike töötingimustes, on latade töötlemistäpsus ja pinnakvaliteet eriti kõrge. Kasutades kodumaal toodetud tiitliitmelist fani latat näidet, mis kasutatakse suure piirkonnasuhelise turbofani mootoris, on latta üldpikkus 681mm, samal ajal kui paksus on vähem kui 6mm. Profiili nõue on -0,12 kuni +0,03mm, süsteemi ja väljapuhangute mõõdetava täpsus on -0,05 kuni +0,06mm, latta ristlõigu väärtusveaharju on sees ± 10′, ja pindelõbususe väärtus Ra on parem kui 0,4 μ m. Selle saavutamiseks tavaliselt nõutav täpset töötlemist viie-akssesel CNC-töölaual. Kuid blaihi madala jõhkratuse, keeruka struktuuri ja raske töödeldava materjali tõttu peavad protsessi juhtivad isikud töötlemise ajal mitu korda kärpimisparameetreid kohandama, et tagada töötlemise täpsus ja kvaliteet, mis tõsiseselt piirab CNC-töölaua võimeid ning põhjustab suure effektiivsuse kaotuse [4]. Seega, ettevõtete kiire arenguga CNC-töötlemistechnoloogia valguses, kuidas saavutada lähedalt-lahutatud osade töötlemisel deformatsiooni kontroll ja vibratsioonide vältimine ning ära kasutada CNC-töötlemiskeskuste võimeid, on muutunud edasijõudnute ettevõtete jaoks akutsseks vajaduseks.
Uurimused kujundmuutuse juhtimistegevuse kohta tundevasid riietega on hoidnud insenerite ja uurijate tähelepanu juba pikka aega. Varases tootmispraktikas kasutasid inimesed sageli veeretamisstrateegiat, mida rakendati mõlematel pooltel puhulgastruktuuridel, mis võib mõningast küljest mugavalt vähendada kujundmuutuste ja vibratsioonide negatiivset mõju mõõtme täpsusele. Lisaks on olemas ka viis, kuidas parandada töötlemise jõgedust, paigaldades eelparendatud ohvristruktuure nagu tugevdamisribad.
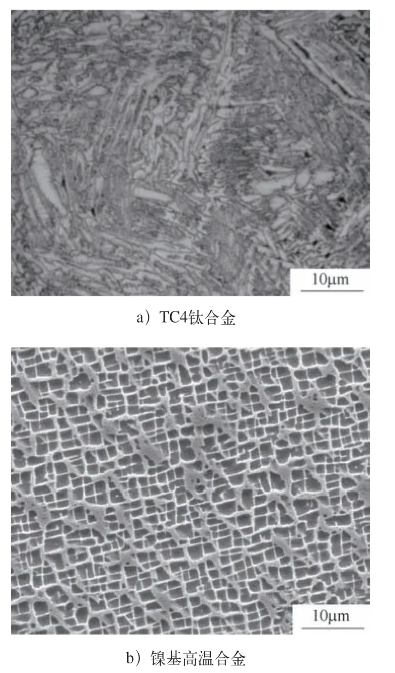
Kõrge temperatuuri ja kõrge rööpimisega keskkonna stabiilsuse nõuetele vastamiseks kasutatakse lendekondade lehtede eelseks materjalina tavaliselt tiitaani liite või kõrgtemperatuurilisi liite. Viimastel aastatel on ka tiitaan-alumiinivahelised lihid muutunud lehe materjalis, mis pakub suurt rakenduspotentsiaali. Tiitaani liitidel on omadused nagu madal termikandlikkus, madal plastilisus, madal elastsete moodul ja tugev sidevõime, mis teeb neist probleemide allikaks, nagu suur režime jõud, kõrge režime temperatuur, tõsine töötugevuse tugevdamine ja suur tööriistade ausamine režimiloomulikult. Need on tipptasemel raske režimega materjalid (mikrostruktuuri kuju vaata joonisel 2a) [7]. Kõrgtemperatuuriliste liitide peamised omadused on kõrge plastilisus ja tugevus, halb termikandlikkus ning suur hulk sissesealustatud lahendusi [8]. Režimiloomulik plastiline deformatsioon põhjustab võrgustiku tõsist muutumist, suurt deformatsiooniprotstanti, suuri režime jõude ja tõsist külmatestamise ilminguid, mis on samuti tipptasemel raske režimega materjalid (mikrostruktuuri kuju vaata joonisel 2b). Seega on oluline arendada raske režimega materjalide, nagu tiitaani liitide ja kõrgtemperatuuriliste liitide, effektiivne ja täpsed režimitehnoloogiad. Raske režimega materjalide effektiivse ja täpse töötlemise saavutamiseks on kodanikud ja välismaad uurinud sügavalt innovatiivseid režimimeetodeid, optimaalseid tööriistade materjale ja optimiseeritud režimeparameetreid.
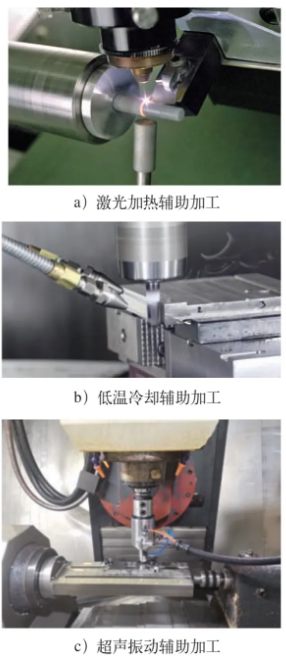
Uurimuste ja arenduste osas, mis puudutavad värskendusmeetodite innovatsioone, on scholaarid esitanud abiellu, nagu lazeri soojendamine ja kriogeense jäätumine, et parandada materjalide töötlemisvõimet ja saavutada tõhusam värskendamine. Lazeri soojendusega töötlemise [9] (vaata joonist 3a) põhimõte on keskendada kõrgejõuline lazeripüks kiilja lähedal asuvale töökaupile nii, et see paiknevalt soojendab materjali, märgatavalt vähendades selle jääbust ning seeläbi ka vähendades värskendusjõudu ja riivset kasutuseloo pikendamisega tööriista ausureid. Kriogeensel jäätumisel põhinev töötlemine [10] (vaata joonist 3b) kasutab väidraatioks tuuletatud veesooni või ültpinge all olevat süsinikdioksiidi gaasi, et jäätma värskenduskohta, mille eesmärk on vähendada värskendamise ajal tekkinud temperatuuri, mis tekib halva termikonduktiivsuse tõttu, ning teha töökaup kohapeal külmaks ja rikkaks, mis parandab ribade katkestamise efektiivsust. Ühendkuningriigi Nuclear AMRC ettevõte kasutas edukalt kõrgepinge süsinikdioksiidiga gaasi, et jäätma tiitaani liitide töötlemise protsessi. Vürtsanalüüs näitas, et kriogeensel jäätumisel põhinev töötlemine võimaldab mitte ainult vähendada värskendusjõudu ja parandada värskenduspindade kvaliteeti, vaid ka tõhusalt vähendada tööriista ausureid ning pikendada selle kasutuseloo. Lisaks on ultraheli vibratsiooniga töötlemine [11, 12] (vaata joonist 3c) ka tõhus meetod raske töötlemiseks materjalidele. Töötlemise ajal rakendatakse tööriistale kõrgeti sagedust ja väikese amplituudiga vibratsioone, mida tuleb saavutada tööriista ja töökaupi vahepealsest eraldumisest, mis muudab materjaliekstraktiomehhanismi, suurendab dünaamilise värskendamise stabiilsust, vältib tõhusalt tööriista ja töötatava pinda vahelisi triktusi, vähendab värskendustemperatuuri ja -jõudu, vähendab pindpuhkuse väärtusi ning tööriista ausureid. Selle erioluliselt hea töötlemise tulemus on saanud laialdaselt tähelepanu.
Raskete lõigamiseks sobimatu materjali, nagu tiitaanilehvede, puhul võib tööriistade materjalide optimeerimine tõhusalt parandada lõikamise tulemusi [8, 13]. Uurimused on näidanud, et tiitaanilehvrite töötlemisel saab erinevate kiirustega kasutada erinevaid tööriisteid. Madalakiirsuse lõigamise korral kasutatakse kõrges kobaltisisest kõrge kiiruse teravetset, keskkiirsuse lõigamise korral aluminioksiidi kaasatud sinterdatud karbiiditööriisteid ja kõrgekiirsuse lõigamise korral kuubset bormetaniidit (CBN) sisaldavaid tööriisteid; kõrgetemperatuuri lehvede töötlemise korral tuleks kasutada kõrge vanadiisisisest kõrge kiiruse teravetset või YG-sinterdatud karbiiditööriisti, mis on kõrge kõrgusuga ja heale kulunemiskiirusega.
Lõikamisparameetrid on ka oluline tegur, mis mõjutab töötlemise tulemust. Sobivate lõikamisparameetrite kasutamine vastavate materjalide puhul võib tõhusalt parandada töötlemise kvaliteeti ja effektiivsust. Võttes näiteks lõikamiskiiruse parameetri, madal lõikamiskiirus võib mugavalt moodustada materjalipinnal hoidla ala, mis vähendab pinnatöötlemise täpsust; kõrge lõikamiskiirus võib mugavalt põhjustada külmahutuse kogumise, mis põhjustab töövahendi ja töökauba polgneid. Selles suhtes analüüsides Harbini Tehnikaülikooli professor Žhai Yuanshengi meeskond harulduste materjalide mehaanilisi ja füüsikalisi omadusi ning koostas soovituse tabeli lõikamiskiiruste kohta raskelt töötletavatele materjalidele ortogonaalsete töötlemise eksperimentide abil [14] (vaata Tabel 1). Soovituste tabelis toodud tööriistade ja lõikamiskiiruste kasutamine võib tõhusalt vähendada töötlemise puudusi ja tööriista ausenemist ning parandada töötlemise kvaliteeti.
Viimastel aastatel on lennundussektori kiire arengu ning turu nõudluse tõusu tõttu suurenenud vajadus effektiivsema ja täpsama töötlemise järele tipunärgaste lehtede puhul, samuti on muutunud vajalikuks parem deformatsiooni kontrollitavus. Intellectuaalse tootmise tehnoloogia raamistikus võimaldab kaasaegne elektroniline ja informaatika integreerida, et saavutada intelligentsed kontrollimehhanismid lendemootoriga lehtede töötlemise ajal tekkinud deformatsioonide ja vibratsioonide kontrollimiseks. Intelligentsete CNC-süsteemide kasutamine keeruliste kõverate pindade täpses töötlemisel ning aktiivne vigakorrigeerimine töötlemisprotsessis võib efektiivselt piirata deformatsioone ja vibratsioone.
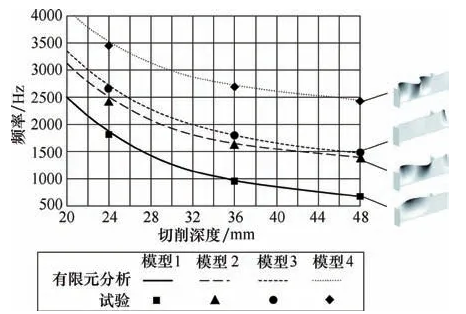
Aktiivse vea kompensatsiooni kasutamiseks töötlemisprotsessis, et saavutada töötlemisparameetrite, nagu tööriista tee, optimeerimine ja juhtimine, on vaja esmalt hankida protsessiparameetrite mõju andmed töötlemisdeformatsioonile ja vibratsioonile. On olemas kaks tavalist meetodit: üks on analüüsida ja tõlgendada iga tööriista läbimise tulemusi masinilises mõõtmises ja veaanalüüsis [15]; teine on luua ennustusmudel töötlemisdeformatsioonile ja vibratsioonile meetodite abil nagu dünaamiline analüüs [16], lõpliku elementi modelleerimine [17], eksperimentid [18] ja neuronnvõrgud [19] (vaata joonist 4).
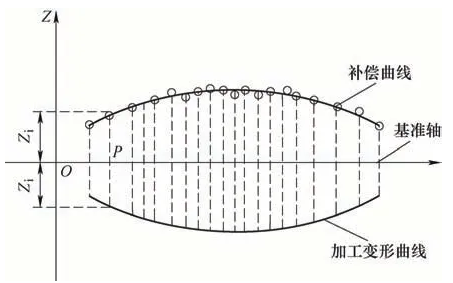
Ülaltoodud ennustusmudeli või masina mõõtmistechnoloogia põhjal võivad inimesed optimeerida ja kontrollida töötlemisparameetreid reaalajas. Põhiprogressioonine suund on vigade korrigeerimine, mis tekivad deformatsioonist ja vibratsioonist, tööriista tee uuesti plaanides. Selle suuna kõige levinum meetod on "peegelkompenseerimismeetod" [20] (vt joon 5). See meetod kompenseerib üheksiku lõigamise deformatsiooni tööriista nimetatud trajektoori parandamise teel. Kuid üksikline kompensatsioon toob kaasa uusi töötlemisdeformatsioone. Seega on vaja luua iteratiivne seos lõikamisjõu ja töötlemisdeformatsiooni vahel mitmete kompensatsioonide kaudu, et korrigida deformatsioone ükshästi. Lisaks aktiivsetele veavigade kompenseerimismeetoditele, mis põhinevad tööriista tee planeerimisel, uurivad paljud teadlased ka seda, kuidas juhtida deformatsiooni ja vibratsiooni lõikamisparameetrite ja tööriista parameetrite optimeerimise ja kontrollimise abil. Teatud tüübi lennukimootoripalga lõikamisel tehakse töötlemisparameetrite muutmise alusel mitmeid ortogonaalseid katseid. Need katseandmed analüüsiti, et uurida iga lõikamis- ja tööriistaparameetri mõju palgade töötlemisdeformatsioonile ja vibratsioonivastusele [21-23]. Toodi kasutusele empiiriline ennustusmudel, et optimeerida töötlemisparameetreid, tõhusalt vähendada töötlemisdeformatsiooni ja supressida lõikamisvibratsioone.
Põhjendades end teatud mudelitele ja meetoditele, on paljud ettevõtted arendanud või parandanud CNC-süsteeme CNC-töötlemiskeskustes, et saavutada tundevarvedega töötlemise parameetrite reaalajas sobitamine. Iisraeli ettevõtte OMAT optimaalne risttöötlemissüsteem [24] on selles valdkonnas tippeja. Selle peamiseks funktsiooniks on töötlemisjõu konstantse hoidmiseks vajalik kiiruse adaptiivne muutmine ning see võimaldab keeruliste toodete kvaliteetset ja tõhusat töötlemist. Lisaks rakendas ka Pekingi Jingdiao sarnast tehnoloogiat klassikalises tehnilises näidises, kus ootekilpkonna pinnaku joonestusi süstemaatiliselt mõõdeti ja adaptiivselt kompenseeriti [25]. Ameerika GE-i THERRIEN [26] esitas CNC-töötlemiskoodidega seotud reaalajas korrekteerimismeetodi, mis pakub alusmeetodit adaptiivseks töötlemiseks ja keeruliste tundevarvedega lehtede reaalajas juhtimiseks. Euroopa Liidu automaatsel parandussüsteemel (AROSATEC) lendukonna turbiinikomponentide parandamisel lisatootmise abil rakendatakse lehedele adaptiivset täpsustöötlemist, mis on juba rakendatud Saksamaa MTU ettevõttes ja Iiri SIFCO ettevõttes [27].
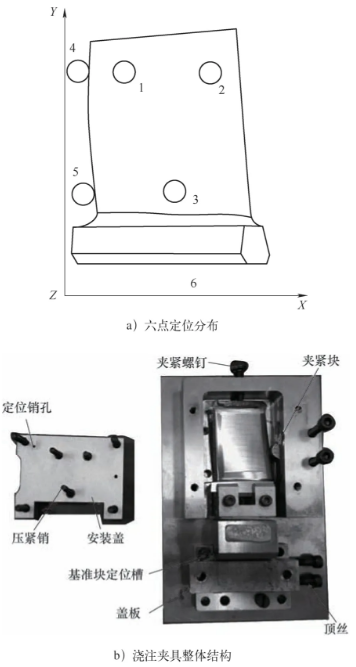
Intelligentse protsessiseadmete kasutamine protsessisüsteemi jõhkratuse parandamiseks ja vabandusomaduste täiendamiseks on ka tõhus viis, et piirata tipunina töötlemise deformatsioone ja vibratsioone, parandada töötlemise täpsust ja pindla kvaliteeti. Viimastel aastatel on erinevates liikides õhurongide lehtede töötlemisel kasutatud suurt hulka erinevaid protsessiseadmeid [28]. Kuna õhurongide lehed tavaliselt omavad tipunina ja mitteregulaarsete struktuuride omadusi, väikese kitsendamise ja positsioneerimise ala, madala töötlemise jõhkratuse ning keraaktsioonide mõju all toimuva lokaalse deformatsiooni, rakendatakse lehe töötlemise seadmel tavaliselt töökatke juures kuue punkti positsioneerimise põhimõtte järgi abilist toetust [29], et optimeerida protsessisüsteemi jõhkratust ja piirata töötlemise deformatsiooni. Tipunina ja mitteregulaarsed kumerad pinnad esitavad kahte nõuet tööriista positsioneerimise ja kitsendamise kohta: esiteks peaks tööriista kitsendusjõud või kontaktjõud olema kumeral pinnal võimalikult tasakaalustatult jagatud, et vältida tugevat lokaalset deformatsiooni töökatke kitsendusjõu mõju all; teiseks peavad tööriista positsioneerimise, kitsendamise ja abiliste toetuse elemendid sobima paremini töökatke keeruka kumera pintti, et luua iga kontaktipunktis ühtlane pindlike kontaktjõud. Need kaks nõuet vastuses on akadeemikud välja pakkunud paindlikku tööriistasüsteemi. Paindlikud tööriistasüsteemid saavad jaguneks faaside muutmise paindlikku tööriistasse ja adapteeruvale paindlikule tööriistale. Faaside muutmise paindlik tööriist kasutab keha faaside muutmise enne ja pärast selle muutmist jõhkratuse ja vabandusomaduste muutust: vedeliku faasis või liigutavas faasis on keha madal jõhkratus ja vabandus ning see võib töökatke keeruka kumera pintti alla adapteeruda madalal rõivall. Pärast seda muutub keha tahkeks faasiks või seda konsolideeritakse välismaailma jõududega nagu elektr/magnet/kuumus ning tema jõhkratus ja vabandus suureneb oluliselt, mis annab võimaluse töökatkele ühtlaselt ja paindlikult toetada ning deformatsiooni ja vibratsiooni piiramiseks.
Traditsioonilises töötlemistechnoloogias lendusõrme käivadega seotud protsessiseadmete kasutamiseks on vahetusmaterjalide, nagu madalameltuspunktsete metallidega täitmine ja abiline toetamine. See tähendab, et pärast töökatse positsioneerimist ja hoidmist kuues punktis, castatakse töökoha positsioneerimisviide madalameltuspunktsete metallide abil kasti, mis pakub töökohale abilist toetust, muutes keerulise punktide positsioneerimise regulaarseks pindade positsioneerimiseks ning seejärel tehakse presitsiivne töötlemine töödeldavast osast (vt joonist 6). Selle protsessimeetodil on ilmsed puudused: positsioneerimisviite teisendamine viib positsioneerimisnäpsuse langusesse; tootmise ettevalmistamine on keeruline, ja madalameltuspunktsete metallide kaestamine ja sulatamine võib kaasa tuua jääkide ja puhastamisprobleemide töökoha pinnal. Samuti on kaestamise ja sulatamise tingimused võrdlemisi halbad [30]. Üheks lahenduseks nimetatud protsessipuuduste korraldamiseks on sageli kasutatav meetod mitmepunktsete toetustruktuuride sissejuhtimine, mis kombinub vahetusmaterjaliga [31]. Toetustruktuuri ülemine lõpp puutub töökoha positsioneerimiseks, samas kui alumine lõpp paikneb madalameltuspunktsete metallide ruumis. Paindlik abilist toetamine saavutatakse madalameltuspunktsete metallide vahetuse omaduste alusel. Kuigi toetustruktuuri sissejuhtimine võib vältida pinna puudusi, mis tekivad madalameltuspunktsete metallide kontaktist sõrmega, ei suuda vahetuse materjalide jõudluse piirangud samal ajal rahuldada kahte peamist nõuet – kõrge järsuse ja kiire reageerimise kiirust – ja neid on raske rakendada kõrge jõudlusega automaattootmisele.
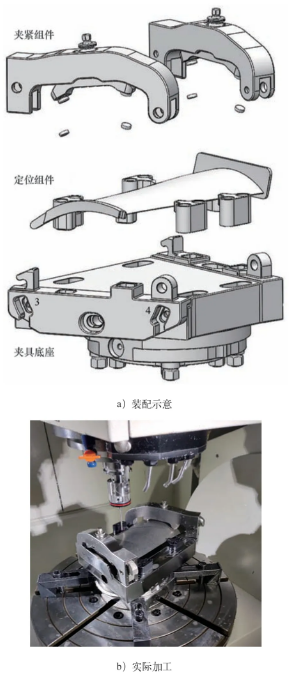
Et lahendada faasimuutusega seotud puudusi paindliku tööriistade valdkonnas, on mitmed uuringumeeched integreerinud adapteerimise mõistet nende tööriistade arendamisse. Adapteerivad paindlikud tööriistad suudavad komplekssete tera kuju ja võimalikke kuju vigu sobitada elektromehaaniliste süsteemide abil. Kontaktjõu tervikliku tera üle tasakaalustatud jagunemise tagamiseks kasutavad tööriistad tavaliselt mitmepunktseid abi-toetusi, et moodustada toetusmaatriks. Pekingi Ülikooli juht WANG Hui meeskond esitas mitmepunktse paindliku abitoetuse protsessi varustuse, mis sobib lähedal võrguvormis olevate terade töötlemiseks [32, 33] (vt joonist 7). Tööriist kasutab mitmeid paindlike materjalide hoidkestelemente, mis aitavad toetada lähedal võrguvormis olevate terade tera pindu, suurendades kontaktalaikut. - Jah. iga kontaktalae ja tagamaks, et vajutusjõud jaguneb tasakaalus igale kontaktosale ja terve lehele, mille tulemuseks on protsessisüsteemi sageduse parandamine ja efektiivne kohalik lehe deformatsiooni vältimine. Tööriistad sisaldavad mitmeid passiivseid liikumisvabadusi, mis võivad adapteeruda lehe kuju ja tema vigadega, samal ajal vältides ülepositsioneerimist. Lisaks saavutatakse adapteeruv toetamine paindlike materjalide abil, kuid elektromagnetse induktsiooni põhimõtet rakendatakse ka adapteeruva paindliku tööriista arendamiseks. Pekingi Aerokosmoseülikooli juht Yang Yiqing arendas elektromagnetse induktsiooni põhimõttel põhinevat abi-toetusteenust [34]. Tööriist kasutab elektromagnetse signaali poolt stimuleeritud paindlikku abi-toetust, mis võib muuta protsessisüsteemi dämpfimise omadusi. Klampimisprotsessi käigus sobib abi-toetus adaptiivselt töökatse kuju vastavalt neelamagneti tekitatud jõuks. Töötlemise ajal edastatakse töökatse poolt tekkiv vibratsioon abi-toetusele ning aktiveeritakse vastane elektromagnetne jõud elektromagnetse induktsiooni põhimõttel, mis hoiab alla ohutööstiku vibratsioone.
Praegu kasutatakse protsessiseadme disainimisel tavaliselt lõpliku elementi analüüsi, geneetilist algoritmi ja muud meetodid mitmete punktide abitoetuste paigutuse optimeerimiseks [35]. Kuid optimeerimise tulemus tagab tavaliselt ainult selle, et töötlemise deformatsioon ühel punktil oleks minimaalne, ja ei pruugi tagada sama suurte deformatsioonide vältimist teistes töötlemisosaedes. Lepiku töötlemisprotsessis tehakse tavaliselt jada ristmeetodeid töökaial samal masinril, kuid erinevate osade töötlemiseks on erinevad hoidmise nõuded, mis võivad isegi olla ajalistel muutustel. Staatilise mitmete punktide toetamise meetodil juhtub, et kui protsessisüsteemi järsus suurendatakse abitoetuste arvu suurenemise kaudu, siis tööriista mass ja ruum suureneb ühest küljest ning tööriista liikumisruum väheneb teisest küljest. Kui abitoetuse asukohta muudetakse erinevate osade töötlemisel, siis töötlemisprotsess peatab end vältimatult ja töötlemise effektiivsus väheneb. Seega on pakutud välja järgnev protsessiseade [36-38], mis võtab töötlemisprotsessi põhjal automaatselt vastu toetuse paigutuse ja toetusjõu online. Järgnev protsessiseade (vaata joonist 8) saavutab dünaamilise toetuse tööriista ja tööriista koordineeritud koostöö kaudu, mis põhineb ajalistel muutustel töötlemisprotsessis enne igasuguse töötlemisprotsessi algust: esmalt liigutatakse abitoetust asendisse, mis aitab vältida praegust töötlemisdeformatsiooni, nii et töötlemispiirkond töölembit toetatakse aktiivselt, samal ajal kui töölembi teised osad jäävad positsioonile võimalikult vähe kontaktiga, midajuures täidetakse töötlemise protsessi käigus muutuvad hoidmise nõuded ajas.
Et edasi parandada protsessiseadme adapteeruva dünaamilise toetuse võimet, vastata keerukamatele hoidmise nõuetele töötlemise käigus ning suurendada lehe töötlemise tootmise kvaliteeti ja tõhusust, laieneb järgnev hõiveabi gruppiks, mis moodustatakse mitmest dünaamilisest abitoetusest. Igal dünaamilisel abitoetusel on vajalik koordineerida tegevusi ning automaatselt ja kiirelt taastada toetuse rühma ja töökauba vaheliste kontaktide protsessimise ajaliselt muutuvate nõuete järgi. Taastamisprotsess ei sega kokku täieliku töökauba paigutamist ega põhjusta kohalikku liikumist või vibratsioone. Selle konpetsiooni alusel loodud protsessiseade nimetatakse iseümberekonfigureeritava gruppfikseerija [39], mis omab joustlikkuse, ümberekonfigureeritavuse ja autonoomsuse eelised. Iseümberekonfigureeritav gruppfikseerija saab jagada mitmeid abitoetuseid erinevatele positsioonidele toetuspinnal protsessimise nõuete järgi ning sobib suurpindlistele keeruka kujuga töökaubadele, samal ajal tagades piisava jõulisuse ja vältides ülearkusid toetusedes. Fikseerija töötamisviis on selline, et kontroller saadab juhiseid programmeeritud programmi kohaselt, ja liikmesepuu viib toetuse elemendi sihtpositsioonile juhiste järgi. Toetuse element sobitub töökauba kohalikule geomeetrilisele kujule, et saavutada nõuetekohane toetus. Ühikuks toetuse elemendiga ja kohaliku töökauba vahelise kontaktipiirkonna dünaamilised omadused (jõlisus ja dämppeerimine) saab kontrollida muutes toetuse elemendi parameetreid (nt hidraulilises toetuse elemendis saab tavaliselt muuta kontaktomadusi muutes sissetoodud hidraulilist survet). Protsessisüsteemi dünaamilised omadused moodustuvad mitmete toetuse elementide ja töökauba vahelise kontaktipiirkonna dünaamiliste omaduste sidestamisest ning on seotud iga toetuse elemendi parameetrite ja toetuse elementide rühma paigutamisega. Mitmekohalise toetuse ümberehitamisskeemi disain iseümberekonfigureeritava gruppfikseerija jaoks peab arvesse võtma järgmisi kolme küsimust: töökauba geomeetrilise kuju sobitamine, toetuse elementide kiire ümberepositseerimine ja mitmete toetuspunktide koordineeritud koostöö [40]. Seega on vaja kasutada töökauba kuju, koormusomadusi ja olemasolevaid piirtingimusi sisendina, et lahendada erinevates töötlemisolukordades mitmekohaline toetuse paigutus ja toetuse parameetrid, plaanida mitmekohalise toetuse liikumisjoon, genereerida juhtimiskood lahenduse tulemustest ja importida see kontrollerisse. Praegu on selle valdkonnaga seotud teemadel teinud mõned uurimised ja katsetused nii välismaal kui ka kodumaal. Välismaal on EU projekt SwarmItFIX arendanud uue väga adapteeruva iseümberekonfigureeritava fikseerijasüsteemi [41], mis kasutab mobiilsidusaid abitoetuseid, mis liiguvad vabaalt töölaual ja ümberepositioneerivad reaalajas, et paremini toetada töödeldavaid osi. SwarmItFIX süsteemi prototüüp on selle projekti raames realiseeritud (vt joonist 9a) ja testitud Itaalia lennukitootja kohta. Hiinas on Tsinghua Ülikooli Wang Hui meeskond arendanud neljapunktset hoidmise ja toetuse töölauat, mida saab masinriista koos koordineerida [42] (vt joonist 9b). See töölaua võib toetada ulatuslikult kinnitatud tenoni ja automatiseeritud tööriista vältimiseks turbiinilappi tenoni liigse töötlemise käigus. Töötlemise käigus koostöödab neljapunktiline abitoetus CNC töötlemiskeskusega, et ümberehitada neljapunktne kontakt olek tööriista liikumispositsiooni järgi, mis mitte ainult vältib tööriista ja abitoetuse vahelist segadust, vaid tagab ka toetuse efektivsuse.
Kuna lendusõrme jõhekaaluhulga kavandamise nõuded jätkuvad kasvama, väheneb osade arv ja osadele määratud jõudel tasand on üha kõrgem. Kaks peamist traditsioonilist kõrgtemperatuurset struktuuri materjali on jõudnud oma piirini. Viimastel aastatel on lendusõrme uute materjalide areng kiirenenud ning üha rohkem kasutatakse kõrgetasemelist materjale tipputehtiste teostamiseks. Neist on eriti oluline γ -TiAl ligandid[43], mis omavad suurepärastid omadusi nagu kõrge spetsiifiline jõgi, kõrge temperatuuri vastupidavus ja heaoksüdaresistentsus. Samal ajal on selle tihe 3.9g/cm3, mis on ainult pool niivõrd kõrgetemperatuursete ligandite tihega. Tulevikus on see suurepärane potentsiaaliga olla tera, mis kasutatakse temperatuurivahemikus 700-800 ℃ . Kuigi γ -TiAl liit on suurepärased mehaanilised omadused, kui tema kõrge kergekus, madal termikandekus, madal murdmine tugevus ja kõrge mürasus viiakse halvete pinnase täielikkusele ja madalale precissioonile γ -TiAl materjaliga kaubeldes, mis mõjutab oluliselt detailite teenindusaega. Seega on γ -TiAl liidu töötlemise uurimine oluline teoreetiline signifikaatne ja väärtus ning see on praegu oluline uurimisvaldkond tera töötlemistehteoloogias.
Lennukemootoripaljad omavad keerulisi kaarepindu ja nende kujupära täpsus on kõrge. Praegu kasutatakse nende presitsiivse töötlemiseks peamiselt geomeetrilist sõltuvustöötlemismenetlusi, mis põhinevad teekava planeerimisel ja mudeli taastoomisel. See meetod võib tõhusalt vähendada positsioneerimise, hoidmise jne põhjustatud vigade mõju paljade töötlemise täpsusele. Siiski toob dieesforgi palgaga mitmekesine paksus töötlemise protsessi erinevates piirkondades erineva sügavuse kaasa, mis lisab ebakindlad tegurid töötlemise protsessi ja mõjutab töötlemise stabiilsust. Tulevikus peaks CNC-sõltuvustöötlemise protsessis paremini jälgima tegelikke töötlemise olemeid [44], mis parandab oluliselt keeruliste kaarepindade töötlemise täpsust ja moodustab ajalist kontrolli sõltuvustöötlemismeetodit, mis põhineb reaalajas tagasisideandmetel töötlemisparameetrite korraldamisel.
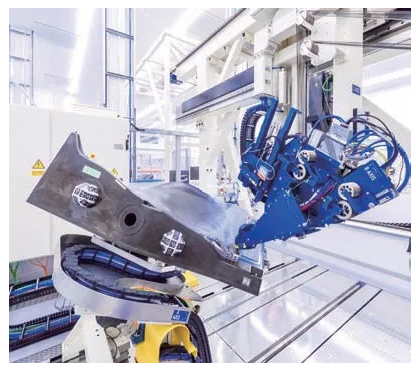
Kuna need on suurimad osad mootoriga seotud, kaupade tootmise tõhusus mõjutab otseks kogu mootori tootmisefektiivsust ja kauba kvaliteet mõjutab otseks mootori jõudlust ja eluiga. Seega on bläddide intelligentne täpsustoimetamine muutunud maailma mootoribläddide tootmise arengusuunaks. Tööriistade ja protsessi varustuse arendamine on võtmeintelligentsele bläddiprotsessile astumiseks. CNC-tehnoloogia arenguga on tööriistade intelligentsus kiiresti tõusnud ning tootmiskasv on oluliselt suurenenud. Seega on intelligentsete protsessivarustuste uurimine ja innovatsioon oluline arengusuund effektiivse ja täpse bläddide tootmiseks. Kõrgelt intelligentsed CNC-tööriistad ühineda protsessivarustusega, et moodustada intelligentne bläddiprosessisüsteem (vt joonist 10), mis võimaldab bläddidele kõrge täpsusega, tõhusalt ja adapteeritavalt CNC-toimetada.
 Külm uudised
Külm uudised2024-12-31
2024-12-04
2024-12-03
2024-12-05
2024-11-27
2024-11-26
Meie professionaalne müügimeeskond ootab teie konsultatsiooni.
 EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 SL
SL
 UK
UK
 VI
VI
 ET
ET
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 GA
GA
 IS
IS






