
Як ключовий компонент для досягнення продуктивності авіаційних двигунів, лопатки мають типові характеристики, такі як тонкостінність, спеціальна форма, складна структура, матеріали, що важко обробляти, і високі вимоги до точності обробки та якості поверхні. Як досягти точної та ефективної обробки лопаток — це головний виклик у сучасній галузі виробництва авіадвигунів. За допомогою аналізу ключових факторів, що впливають на точність обробки лопаток, повністю підсумовано поточний стан досліджень технологій та обладнання точної обробки лопаток, а також перспективи розвитку технологій обробки лопаток для авіадвигунів.
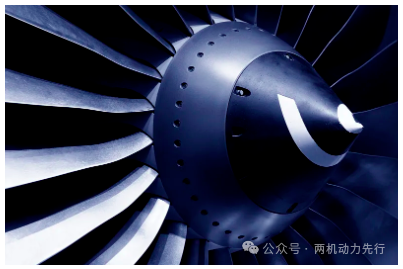
У галузі авіакосмічної промисловості широко використовуються легкі, високопрочні тонкостінні деталі, які є ключовими компонентами для досягнення продуктивності важливої техніки, таких як літаківі двигуни [1]. Наприклад, титанові сплави вентиляторних лопаток великих обходових двигунів (див. Рисунок 1) можуть досягати довжини до 1 метра, маючи складний профіль лопаток та амортизуючі платформи, при цьому товщина найтоншої частини становить лише 1,2 мм, що є типовим великогабаритним тонкостінним спеціальним контуром [2]. Як типова тонкостінна спеціальна слабка жорстична деталь, лопатка піддається деформації та коливанням під час обробки [3]. Ці проблеми серйозно впливають на точність обробки та якість поверхні лопатки.
Ефективність роботи двигуна у значній мірі залежить від рівня виготовлення лопаток. Під час експлуатації двигуна лопатки повинні стабільно працювати у екстремальних умовах, таких як висока температура і тиск. Це вимагає, щоб матеріал лопатки мав хорошу міцність, стійкість до втоми та корозії при високих температурах, а також забезпечував структурну стійкість [2]. Зазвичай для лопаток авіаційних двигунів використовуються титанові сплави або високотемпературні сплави. Проте, титанові сплави та високотемпературні сплави мають низьку оброблюваність. Під час фрезерування сила розрізу велика, а інструмент швидко зношуються. За збільшенням зношування інструменту сила розрізу ще більше зростатиме, що призводить до більш суттєвої деформації і вibrації під час обробки, що, у свою чергу, призводить до низької точності розмірів та поганої якості поверхні деталей. Щоб задовольнити вимоги до експлуатаційних характеристик двигуна у екстремальних умовах роботи, точність обробки і якість поверхні лопаток дуже високі. Наприклад, у разі титанових лопаток вентилятора, які використовуються у виробничому високий байпасний турбовентиляторному двигуні, загальна довжина лопатки становить 681 мм, тоді як її товщина менше 6 мм. Вимоги до профілю -0,12 до +0,03 мм, точність розмірів входжих і вихідних країв -0,05 до +0,06 мм, кутова похибка перерізу лопатки знаходиться всередині ± 10′, а значення шorstі поверхнi Ra краще, ніж 0.4 μ м. Це зазвичай вимагає точного оброблення на п'ятиосному CNC-виробничьому інструменті. Проте, через слабку жорсткість лопатки, складну структуру та важкоспоживальні матеріали, щоб забезпечити точність обробки та якість, працівники процесу повинні багаторазово коригувати параметри розрізу під час процесу обробки, що серйозно обмежує ефективність CNC-центру обробки і призводить до великої втрати ефективності [4]. Отже, з швидким розвитком технології CNC-обробки, як досягти контролю деформації та підтискання вibrацій під час обробки тонкостінних деталей та повністю використовувати можливості CNC-центру обробки стало набагато необхіднішим для передових компаній у галузі виробництва.
Дослідження технології керування деформацією тонкостінних слабкорозумних деталей привертали увагу інженерів і дослідників протягом довгого часу. У ранній виробничій практиці люди часто використовували стратегію водяної лінії з чергуванням фрезерування з обох боків тонкостінних структур, що може до певного ступеня зменшувати небажані наслідки впливу деформації і коливань на розмірну точність. Крім того, існує також спосіб підвищення обробної жорсткості шляхом встановлення передбачених жертвенних конструкцій, таких як армувані ребра.
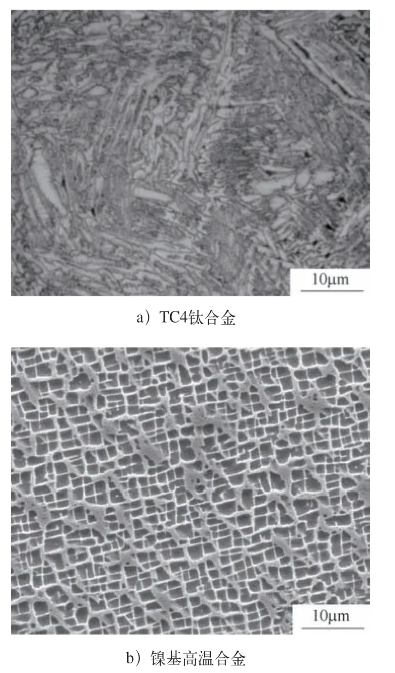
Щоб відповісти на вимоги стабільної роботи у середовищі високої температури та високого тиску, звичайно використовуються матеріали для лопаток aviаційних двигунів - титанові сплави або високотемпературні сплави. За останні роки міжметалеві склади титану-алумінію також стали матеріалом для лопаток з великим потенціалом застосування. Титанові сплави мають характеристики низької теплопровідності, низької пластичності, низького еластичного модуля і сильного прив'язування, що призводить до проблем, таких як велика сила розрізу, висока температура розрізу, сильне упостійливлення під час обробки і великий знос інструменту. Вони є типовими важкос Dichними матеріалами (мікроструктура, див. Рисунок 2a) [7]. Головні характеристики високотемпературних сплавів - це висока пластичність і міцність, погана теплопровідність і велика кількість густої твердої розчинності всередині [8]. Пластична деформація під час розрізу призводить до сильного перекручення ґратки, високої опору деформації, великої сили розрізу і сильного феномену холодного упостійливлення, що також є типовими важкос Dichними матеріалами (мікроструктура, див. Рисунок 2b). Отже, розвиток ефективних і точних технологій розрізу важкос Dichних матеріалів, таких як титанові сплави і високотемпературні сплави, є дуже важливим. Щоб досягти ефективного і точного оброблення важкос Dichних матеріалів, вченими з України та інших країн було проведено глибоке дослідження з позицій інноваційних методів розрізу, оптимальних матеріалів для інструментів обробки та оптимізованих параметрів розрізу.
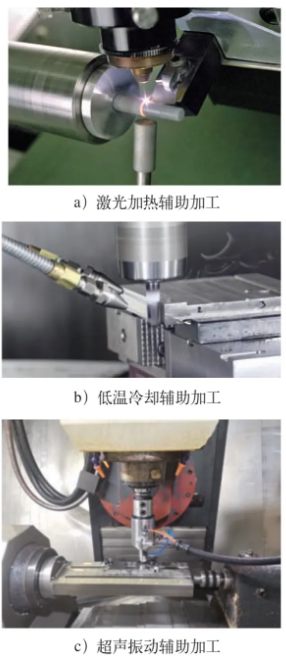
У термінах інноваційних досліджень та розробки методів розрізання, ученні представили допоміжні засоби, такі як лазерний нагрів та криогенне охолодження, щоб покращити оброблюваність матеріалів та досягти ефективного розрізання. Принцип роботи лазерного нагріву підтримуваної обробки [9] (див. Рисунок 3a) полягає у фокусуванні високопотужного лазерного променя на поверхні деталі перед гранню розрізання, що спричиняє м'якшення матеріалу за допомогою локального нагріву променем, зменшує межу пластичності матеріалу, а отже, зменшує сили розрізання та зношування інструменту, покращуючи якість та ефективність розрізання. Криогенне охолодження підтримуваної обробки [10] (див. Рисунок 3b) використовує рідинний азот, високотисковий газ двагеневого оксиду вуглецю та інші охолоджувальні середовища для опрыскування області розрізання, щоб охолонути процес розрізання, уникнути проблеми надмірної локальної температури розрізання, що виникає через погану теплопровідність матеріалу, і зробити деталь локально холодною та хрупкою, що покращує ефект зрікання стружки. Компанія Nuclear AMRC у Великобританії успішно використала високотисковий газ двагеневого оксиду вуглецю для охолодження процесу обробки титанового сплаву. У порівнянні з станом сухого розрізання, аналіз показує, що криогенне охолодження підтримуваної обробки не тільки зменшує сили розрізання та покращує якість поверхні розрізання, але й ефективно зменшує зношування інструменту та збільшує термін його служби. Крім того, ультразвукова вibrаційна підтримувана обробка [11, 12] (див. Рисунок 3c) також є ефективним методом ефективного розрізання важкообробних матеріалів. За допомогою наведення високочастотних, малоамплітудних вibrацій до інструменту досягається періодичне відокремлення між інструментом та деталлю під час обробки, що змінює механізм вилучення матеріалу, покращує стабільність динамічного розрізання, ефективно уникатиме тертя між інструментом та обробленим поверхнем, зменшує температуру розрізання та сили розрізання, зменшує значення шorstкості поверхні та зношування інструменту. Її відмінні технологічні ефекти отримали широке увагу.
Для складних для обробки матеріалів, таких як титанові сплави, оптимізація матеріалів інструментів може ефективно покращити результати розрізання [8, 13]. Дослідження показали, що для обробки титанових сплавів можна вибирати різні інструменти залежно від швидкості обробки. При низькій швидкості розрізання використовується висококобальтовий швидкорізний стал, при середній швидкості розрізання — тверді інструменти з оксидом алюмінію, а при високій швидкості розрізання — інструменти з кубічним боронітрідом (CBN); для обробки високотемпературних сплавів слід використовувати високованадійну швидкорізну сталь або тверді YG-інструменти з високою твердістю і хорошим супротивленням зносу.
Параметри розрізання також є важливим фактором, який впливає на результат обробки. Використання відповідних параметрів розрізання для відповідних матеріалів може ефективно покращити якість і ефективність обробки. Прикладом може бути параметр швидкості розрізання: низька швидкість розрізання легко призводить до утворення зони прикріпленого краю на поверхні матеріалу, що зменшує точність обробки поверхні; висока швидкість розрізання легко призводить до накопичення тепла, що спричиняє опалення деталей та інструментів. У цьому контексті команда професора Чай Юаньшена з Харбінського університету науки та технологій проаналізувала механічні та фізичні властивості поширенних складноподатних матеріалів і підсумувала рекомендовану таблицю швидкостей розрізання для складноподатних матеріалів за допомогою ортогональних експериментів обробки [14] (див. Таблицю 1). Використання інструментів та швидкостей розрізання, рекомендованих у таблиці, може ефективно зменшити дефекти обробки та знос інструменту, а також покращити якість обробки.
У останні роки, з швидким розвитком авіаційної промисловості та зростаючим ринковим запитом, вимоги до ефективної та точної обробки тонкостінних лопаток стають все більш суттєвими, а потреба у більш точній технології керування деформацією стає набагато більш нагальною. У контексті інтелектуальних технологій виробництва, поєднуючи сучасні електронно-інформаційні технології для досягнення інтелектуального керування деформацією та вibrаціями під час обробки лопаток aviакосмiчних двигунів, стало популярною темою серед багатьох дослідників. Впровадження інтелектуальних систем CNC у точну обробку складних криволінійних поверхонь лопаток та активна компенсація помилок під час обробки на основі інтелектуальних систем CNC може ефективно підтримувати контроль над деформацією та вibrаціями.
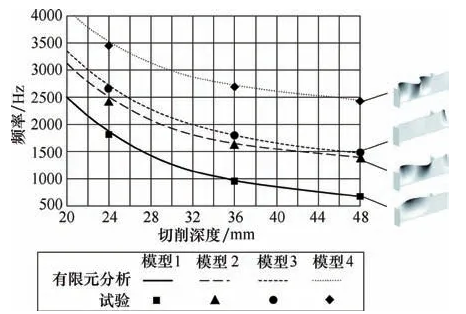
Для активної компенсації помилок у процесі обробки, щоб досягнути оптимізації та контролю параметрів обробки, таких як шлях інструмента, спочатку необхідно отримати вплив технологічних параметрів на деформацію та коливання під час обробки. Існують дві поширені методики: одна полягає в аналізі та висновках результатів кожного проходу інструменту за допомогою вимірювань на машині та аналізу помилок [15]; інша — створення прогнозної моделі для деформації та коливань під час обробки за допомогою методів, таких як динамічний аналіз [16], моделювання скінченним елементом [17], експерименти [18] та нейронні мережі [19] (див. рисунок 4).
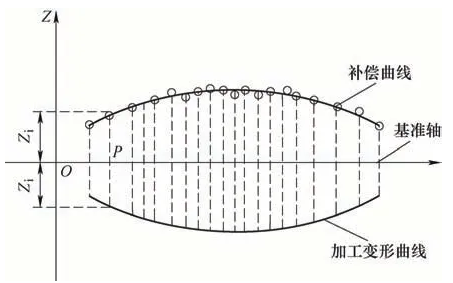
На основі наведеної моделі прогнозування або технології вимірювання на машині люди можуть оптимізувати, а навіть керувати параметрами обробки у режимі реального часу. Головне напрямок полягає у компенсації похибок, що виникають через деформацію і вibrацію, переплануванням траєкторії інструменту. Звичайно використовуваний метод у цьому напрямку - це "метод дзеркальної компенсації" [20] (див. Рисунок 5). Цей метод компенсує деформацію одноразового розрізу шляхом корекції номінальної траєкторії інструменту. Проте, одноразова компенсація може призвести до нових деформацій під час обробки. Тому необхідно встановити ітераційну залежність між силою розрізу і деформацією обробки за допомогою багаторазової компенсації для поступового виправлення деформацій. Крім методу активної компенсації похибок на основі планування траєкторії інструменту, багато учених також досліджують, як контролювати деформацію і вibrацію шляхом оптимізації і керування параметрами розрізу і параметрами інструменту. Для розрізу певного типу лопатки двигуна літака було проведено декілька серій ортогональних тестів зміни параметрів обробки. На основі даних тестів було проаналізовано вплив кожного параметра розрізу і параметра інструменту на деформацію обробки лопатки і вibrаційну відповідь [21-23]. Було створено емпіричну модель прогнозування для оптимізації параметрів обробки, ефективного зменшення деформації обробки та подавлення вibrації розрізу.
На основі вказаних моделей та методів багато компаній розробили або покращили системи ЧПУ центрів механічної обробки для досягнення реального часу адаптивного керування параметрами обробки тонкостінних деталей. Оптимальна система фрезерування ізраїльської компанії OMAT [24] є типовим представником у цій галузі. Вона головним чином регулює швидкість подавання за допомогою адаптивної технології для досягнення мети константного силового фрезерування та реалізації ефективної та якісної обробки складних продуктів. Крім того, Пекінська компанія Jingdiao також застосувала подібну технологію у класичному технічному випадку завершення гравюрування поверхні яйцевої скорухи за допомогою адаптивної компенсації під час вимірювання на машині [25]. ТЕРРИЕН з GE США [26] запропонував метод реального коригування кодів ЧПУ під час обробки, що надав базових технічних засобів для адаптивної обробки та реального керування складними тонкостінними лопатками. Автоматизована система ремонту турбокомпонентів літаків Європейського Союзу (AROSATEC) реалізує адаптивне точкове фрезерування після ремонту лопатки додавальноюmanufacturing технологією, що вже застосовується у виробничому ремонті лопаток німецької компанії MTU та ірландської компанії SIFCO [27].
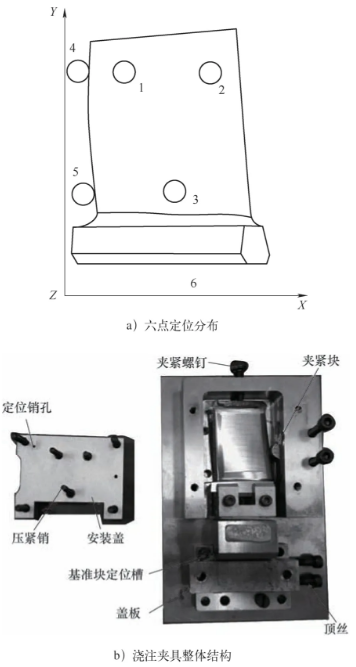
Використання інтелектуального процесного обладнання для покращення жорстичності системи обробки та поліпшення амортізаційних характеристик є також ефективним способом під час подавлення деформації та вibrацій при обробці тонкостінних лопаток, поліпшення точності обробки та якості поверхні. За останні роки було застосовано велику кількість різного процесного обладнання для обробки різних видів лопаток авіаційних двигунів [28]. Оскільки лопатки авіаційних двигунів загалом мають тонкостінні та нерегулярні структурні характеристики, невелику площу зажиму та позиціонування, низьку жорсткість обробки та місцеву деформацію під дією різальних навантажень, у пристрої для обробки лопаток зазвичай застосовуються допоміжні підтримки до деталі на основі шеститочкового принципу позиціонування [29], щоб оптимізувати жорсткість системи обробки та під час подавлення деформації обробки. Тонкостінні та нерегулярні криволінійні поверхні поставляють два вимоги до позиціонування та зажиму інструменту: перше — сила зажиму чи контактна сила інструменту повинна бути розподілена якомога рівномірно на криволінійній поверхні, щоб уникнути серйозної місцевої деформації деталі під дією сили зажиму; друге — елементи позиціонування, зажиму та допоміжної підтримки інструменту повинні краще відповідати складній криволінійній поверхні деталі, щоб створити рівномірну силу поверхневого контакту в кожній точці контакту. У відповідь на ці дві вимоги ученні запропонували гнучкий системний інструмент. Гнучкі системні інструменти можна розділити на фазові гнучкі інструменти та адаптивні гнучкі інструменти. Фазові гнучкі інструменти використовують зміни жорсткості та амортізації перед і після фазового переходу рідини: рідина у фазі рідини або мобільній фазі має низьку жорсткість та амортізацію, і може пристосовуватися до складної криволінійної поверхні деталі під низьким тиском. Потім рідина перетворюється у тверду фазу або консолідується за допомогою зовнішніх сил, таких як електричність/магнетизм/тепло, і значно покращується жорсткість та амортізація, таким чином забезпечуючи рівномірну та гнучку підтримку деталі та під час подавлення деформації та вibrацій.
Обладнання процесу в традиційній технології обробки лопаток aviаційних двигунів полягає у використанні матеріалів з фазовими перетвореннями, таких як сплави низької температури плавлення, для заповнення допоміжною підтримкою. Іншими словами, після того як заготовка деталі була зафіксована і закріплена у шести точках, посадочна база деталі отлито у формувальний блок через сплав низької температури плавлення, щоб забезпечити допоміжну підтримку деталі, а складне точкове посадку перетворено на регулярне поверхневе посадку, а потім виконується точна обробка деталі (див. Рисунок 6). Цей метод процесу має очевидні недоліки: перетворення посадочної бази призводить до зменшення точності посадки; підготовка виробництва є складною, а відливання і розплавлювання сплавів низької температури плавлення також призводить до залишків і проблем очищення на поверхні деталі. При цьому умови відливання і розплавлювання також досить погані [30]. Щоб вирішити вищезазначені технологічні недоліки, загальний метод полягає в введенні структури багатоточкової підтримки, поєднаної з матеріалом з фазовими перетвореннями [31]. Верхній кінець конструкції підтримки контактує з деталлю для посадки, а нижній кінець опущений у камеру з сплавом низької температури плавлення. Достігається гнучка допоміжна підтримка на основі характеристик фазового перетворення сплаву низької температури плавлення. Нехай введення конструкції підтримки може уникнути поврехневих дефектів, що виникають через контакт сплавів низької температури плавлення з лопатками, через обмеження властивостей матеріалів з фазовими перетвореннями, фазова гнучка оснастка не може одночасно задовольняти двом головним вимогам - висока жорсткість і висока швидкість відгуку, і важко застосовувати її у високоэффективному автоматизованому виробництві.
Щоб вирішити недоліки фазового переходу гнучкого інструментування, багато учених включили концепцію адаптації до дослідження та розробки гнучкого інструментування. Адаптивне гнучке інструментування може адаптивно відповідати складним формам лопаток та можливим помилкам у формі за допомогою електромеханічних систем. Щоб забезпечити рівномірне розподілення контактної сили по всій лопатці, інструментування зазвичай використовує багатоточкові допоміжні підпори для створення матриці підтримки. Команда Вана Хуя з Університету Цінгхуа запропонувала багатоточкове гнучке допоміжне підтримуюче процесове обладнання, придатне для обробки лопаток близько до чистої форми [32, 33] (див. Рисунок 7). Інструментування використовує кілька гнучких елементів зажиму матеріалу для допомоги у підтримці поверхні лопатки близько до чистої форми, збільшуючи площу контакту кожна контактна площа та забезпечення того, щоб сила зчеплення була рівномірно розподілена на кожній контактній частині та всьому лезі, що поліпшує жорсткість процесної системи та ефективно запобігає локальній деформації леза. Інструмент має кілька пасивних ступенів вільності, які можуть адаптивно відповідати формі леза та його похибці, при цьому уникнувши перешкоджень. Крім досягнення адаптивної підтримки через гнучкі матеріали, також застосовується принцип електромагнітної індукції для дослідження та розробки адаптивного гнучкого інструменту. Команда Янга Йіцина з Пекінського університету авіації та космонавтики винахідничають допоміжний підтримуючий пристрій на основі принципу електромагнітної індукції [34]. Інструмент використовує гнучку допоміжну підтримку, яка стимулюється електромагнітним сигналом, що може змінювати амортизаційні характеристики процесної системи. Під час фіксації допоміжна підтримка адаптивно відповідає формі деталі під дією постійного магніта. Під час обробки вibrація, що виникає у деталі, передасться до допоміжної підтримки, і за принципом електромагнітної індукції буде стимулюватися зворотня електромагнітна сила, таким чином під час обробки подавляючи вibrацію тонкошарової деталі.
На даний момент, у процесі проектування обладнання, загалом використовуються методи скінченних елементів, генетичного алгоритму та інші для оптимізації розташування багатоточкових допоміжних підтримок [35]. Проте, результат оптимізації зазвичай може лише забезпечити мінімізацію обробного деформування в одній точці, не гарантує, що такий самий ефект подавлення деформації буде досягнутим в інших частинах обробки. У процесі обробки лопатки, як правило, виконується серія проходжень інструменту на заготовці на тій самій верстачній машині, але вимоги до фіксації при обробці різних частин можуть відрізнятися і навіть бути змінними за часом. Для статичного багатоточкового методу підтримки, якщо жорсткість процесної системи покращується шляхом збільшення кількості допоміжних підтримок, з одного боку, маса і об'єм оснащення зростуть, а з іншого боку, простір руху інструменту буде стиснутим. Якщо позицію допоміжної підтримки перевстановлюють при обробці різних частин, процес обробки необхідно буде перервати, що зменшить ефективність обробки. Тому було запропоновано послідовне процесне обладнання [36-38], яке автоматично регулює розташування підтримки та сили підтримки онлайн відповідно до процесу обробки. Послідовне процесне обладнання (див. Рисунок 8) може досягти динамічної підтримки через координовану співпрацю інструменту та оснащення на основі траєкторії інструменту та змін умов часової змінної процесу розрізу перед початком будь-якої процедури обробки: спочатку перемістити допоміжну підтримку у позицію, яка допомагає підприсувати поточне деформування обробки, щоб обробний район... робочий матеріал активно підтримується, тоді як інші частини робочого матеріалу залишаються на місці з мінімально можливим контактом, відповідаючи таким чином змінним у часі вимогам фіксації під час процесу обробки.
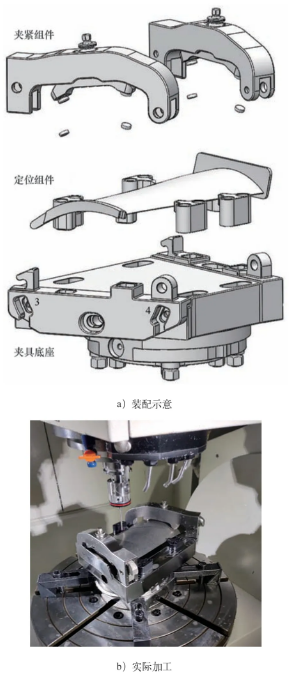
Щоб ще більше покращити адаптивну динамічну підтримку обладнання для процесів, відповісти на більш складні вимоги фіксації під час обробки та підвищити якість та ефективність виробництва обробки лопаток, допоміжна підтримка розширюється до групи, утвореної з декількох динамічних допоміжних підтримок. Кожна динамічна допоміжна підтримка повинна координувати дії та автоматично та швидко перебудовувати контакт між групою підтримки та деталлю за змінними вимогами технологічного процесу. Процес перебудови не повинен заваджувати позиціонуванню всього заготовку та не повинен призводити до локального зсуву або коливань. Обладнання для процесів, що базується на цьому концепті, називається самоперебудовуваним груповим фіксатором [39], який має переваги гнучкості, можливості перебудови та автономності. Самоперебудовуваний груповий фіксатор може розподіляти кілька допоміжних підтримок на різні позиції поверхні, що підтримується, за вимогами технологічного процесу, і може пристосовуватися до складноподібних деталей великої площі, одночасно забезпечуючи достатню жорсткість та виключаючи зайві підтримки. Спосіб роботи фіксатора полягає в тому, що контролер надсилає інструкції за програмованим програмуванням, і мобільна основа переносить елемент підтримки до цільової позиції за інструкціями. Елемент підтримки пристосовується до локальної геометричної форми деталі для досягнення послушної підтримки. Динамічні характеристики (жорсткість та демпфування) зони контакту між окремим елементом підтримки та локальною деталлю можуть керуватися зміною параметрів елемента підтримки (наприклад, гідропідпорний елемент зазвичай може змінювати входящий гідродавлення для зміни контактних характеристик). Динамічні характеристики системи обробки утворюються за допомогою зв'язування динамічних характеристик зони контакту між декількома елементами підтримки та деталлю, і вони пов'язані з параметрами кожного елемента підтримки та композицією групи елементів підтримки. При проектуванні схеми багатоточкової перебудови самоперебудовуваного групового фіксатора необхідно враховувати наступні три питання: пристосування до геометричної форми деталі, швидке повторне позиціонування елементів підтримки та координоване співробітництво багатьох точок підтримки [40]. Отже, при використанні самоперебудовуваного групового фіксатора необхідно використовувати форму деталі, навантажені характеристики та власні граничні умови як вхідні дані для вирішення багатоточкової композиції та параметрів підтримки при різних умовах обробки, планувати шлях руху багатоточкової підтримки, генерувати код керування з результатів вирішення та імпортувати його до контролера. На даний час, вченими з України та інших країн проведено деякі дослідження та спроби щодо самоперебудовуваних групових фіксаторів. За кордоном, у рамках проекту EU SwarmItFIX було розроблено нову високоприспособлену систему самоперебудовуваного фіксатора [41], яка використовує набір мобільних допоміжних підтримок для вільного руху по верстаку та реального часу перепозиціонування для кращої підтримки обробляних деталей. Прототип системи SwarmItFIX був реалізований в цьому проекті (див. Рисунок 9a) та протестований на місці італійського виробника літаків. У Китаї, команда Вана Хуя з Тsinhua University розробила чотириточковий верстат для фіксації та підтримки, який може керуватися в координації з верстатом [42] (див. Рисунок 9b). Цей верстат може підтримувати висувну частину і автоматично уникати інструменту під час точньої обробки висувної частини лопатки турбіни. Під час обробки чотириточна допоміжна підтримка співпрацює з числовим верстатом для перебудови чотириточного стану контакту за позицією руху інструменту, що не тільки уникатиме взаємодії між інструментом та допоміжною підтримкою, але й забезпечить ефект підтримки.
З ростом вимог до співвідношення тяги до ваги у двигунах літаків, кількість деталей поступово зменшується, а рівень навантаження на деталі стає все вищим і вищим. Властивості двох головних традиційних високотемпературних структурних матеріалів досягли своєї межі. За останні роки нові матеріали для лопаток двигунів літаків розвинулися швидко, і все більше високоякісних матеріалів використовуються для виготовлення тонкостінних лопаток. Серед них, γ -TiAl сплав[43] має відмінні властивості, такі як висока удельна сила, високотемпературна стійкість і хороша оксидуюча стійкість. При цьому його густина становить 3.9г/см3, що складає лише половину від густини високотемпературних сплавів. У майбутньому він має великий потенціал як лопатка у температурному діапазоні 700-800 ℃ . Хоча γ -Сплав TiAl має відмінні механічні властивості, його висока твердість, низька теплопровідність, низька стійкість до тріщины і висока хрупкість призводять до поганої поверхневої цілісності та низької точності γ -матеріалу TiAl під час гіркання, що серйозно впливає на термін служби деталей. Тому дослідження обробки γ -сплаву TiAl має важливе теоретичне значення та цінність, і є важливою напрямком досліджень сучасних технологій обробки лопаток.
Лопатки газотурбінових двигунів мають складні криволінійні поверхні та вимагають високої точності форми. На сьогоднішній день їх точна обробка головним чином використовує геометричні адаптивні методи обробки, які базуються на плануванні шляху та реконструкції моделей. Цей метод може ефективно зменшувати вплив помилок, що виникають через позиціонування, фіксування тощо, на точність обробки лопаток. Проте через нерівномірну товщину заготовки лопатки методом горячого формування, глибина розрізу у різних зонах інструменту відрізняється під час процесу розрізу за запланованим шляхом, що створює невизначені фактори для процесу розрізу та впливає на стабільність обробки. У майбутньому, під час процесу числового програмного керування (CNC) адаптивною обробкою, необхідно краще відстежувати зміни реального стану обробки [44], що значно покращить точність обробки складних криволінійних поверхонь та сформує метод часово-залежного контролю адаптивної обробки, що коригує параметри розріву на основі даних реального часу.
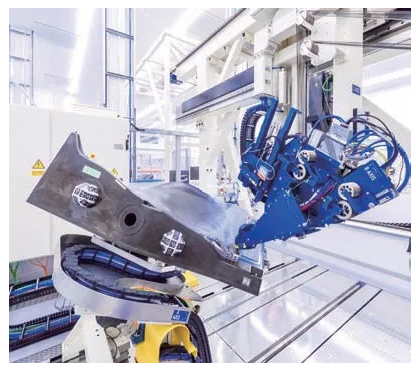
Як найбільшому типу деталей у двигуні, ефективність виготовлення лопаток напряму впливає на загальну ефективність виготовлення двигуна, а якість виготовлення лопаток напряму впливає на characteristics特性 та тривалість життя двигуна. Тому інтелектуальне точкове оброблення лопаток стало напрямком розвитку виробництва лопаток для двигунів у сучасному світі. Розробка станків та технологічного обладнання є ключем до реалізації інтелектуального оброблення лопаток. З розвитком технології ЧПУ рівень інтелектуальності станків швидко підвищився, а їхня здатність до обробки та виробництва значно покращилася. Отже, дослідження, розробка та інновації в галузі інтелектуального технологічного обладнання є важливим напрямком розвитку для ефективного і точного оброблення тонкостінних лопаток. Високоінтелектуальні станки ЧПУ, поєднані з технологічним обладнанням, утворюють систему інтелектуального оброблення лопаток (див. Рисунок 10), яка реалізує точну, ефективну та адаптивну обробку ЧПУ для тонкостінних лопаток.
 Горячі новини
Горячі новини2024-12-31
2024-12-04
2024-12-03
2024-12-05
2024-11-27
2024-11-26
Наша професійна команда з продажу чекає на вашу консультацію.
 EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 SL
SL
 UK
UK
 VI
VI
 ET
ET
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 GA
GA
 IS
IS






