
Jako kľúčová komponenta na dosiahnutie výkonnosti lietadlových motorov majú lopatky typické charakteristiky, ako sú tenké steny, špeciálne tvary, zložité štruktúry, ťažko spracovateľné materiály a vysoké požiadavky na presnosť obrábania a kvalitu povrchu. Ako dosiahnuť presnú a efektívnu obrábanosť lopatiek je hlavnou výzvou v súčasnej oblasti výroby lietadlových motorov. Cezi analýzu kľúčových faktorov ovplyvňujúcich presnosť obrábania lopatiek je celkom shrnutý súčasný stav výskumu technológií a vybavenia presného obrábania lopatiek, a prospe sa o rozvojovom trende technológie obrábania lopatiek pre lietadlové motory.
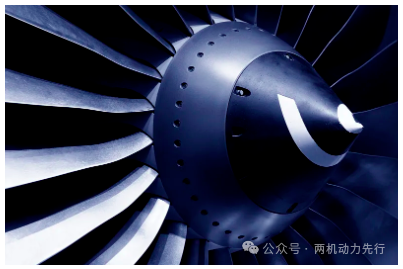
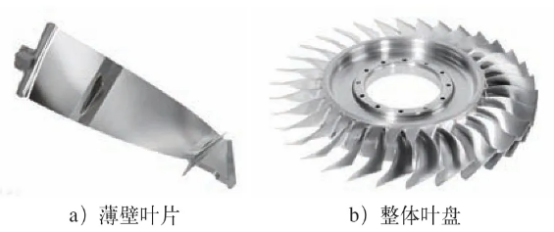
V letectve a vesmírnej technike sa široko používajú komponenty s nízkou hmotnosťou, vysokou pevnosťou a tenkými stenami, ktoré sú kľúčovými časťami na dosiahnutie výkonu dôležitého vybavenia ako sú letecké motory [1]. Napríklad, titanové lopatky ventilátorov veľkých leteckých motorov s vysokým stupeňom obchodu (vidieť obrázok 1) môžu mať dĺžku až 1 meter, so zložitými profilmi lopatiek a amortizačnými platformami, pričom hrúbka najtenšej časti je iba 1,2 mm, čo je typický príklad veľkostenej špeciálnej časti [2]. Jako typická tenkostenná špeciálna časť s slabou tupeňou, lopatka je predmetom deformácií a vibrácií počas spracovania [3]. Tieto problémy vážne ovplyvňujú presnosť spracovania a povrchovú kvalitu lopatiek.
Výkon motora závisí veľmi od úrovne výroby lopatiek. Počas prevádzky motoru musia lopatky pracovať stabilne v extrémnych podmienkach, ako sú vysoká teplota a vysoký tlak. To vyžaduje, aby materiál lopatiek mal dobrú pevnosť, odolnosť proti unavovaniu a vysokooteplnej korozií, pričom je potrebné zabezpečiť štrukturálnu stabilitu [2]. V bežnom prípade sa používajú titanové alejy alebo vysokooteplné aleje na lopatky leteckých motorov. Avšak titanové aleje a vysokooteplné aleje majú slabú obrateľnosť. Počas rezačného procesu je sila rezu veľká a nástroj sa rýchlo opotrebováva. Keď sa opotrebovanie nástroja zvyšuje, sila rezu sa ešte viac zvýši, čo spôsobí vážnejšie deformácie a vibrácie počas obrábania, čo viedlo k nízkej rozmernosti a chudobnej povrchovej kvalite dieliek. Aby bolo možné splniť požiadavky na výkonnosť motoru v extrémnych pracovných podmienkach, je potrebná mimoriadne vysoká presnosť obrábania a povrchová kvalita lopatiek. Na príklade titanových alejových ventilátorových lopatiek použitých v domáce vyvinutom turboventilátorovom motore s vysokým stupeňom prechodu, celková dĺžka lopatky je 681mm, zatiaľ čo jej hrúbka je menej ako 6mm. Profilová požiadavka je -0,12 do +0,03mm, rozmerná presnosť vstupných a výstupných hran je -0,05 do +0,06mm, a zotrvačná chyba rezy lopatky je vo vnútri ± 10′, a hodnota povrchovej hrubosti Ra je lepšia než 0,4 μ m. To obvykle vyžaduje presnú obrábanie na štvorstrannej CNC strojovacej jednotke. Však kvôli slabej pevnosti lopasty, zložitej štruktúre a ťažko obrabateľným materiálom, aby sa zabezpečila presnosť obrábania a kvalita, musia technologické pracovníci počas procesu obrábania viackrát upraviť režacie parametre, čo vážne obmedzuje výkon CNC obrábanicového centra a spôsobuje obrovské straty efektívnosti [4]. Preto, s rýchlym rozvojom technológií CNC obrábania, ako dosiahnuť kontrolu deformácie a tlmenie vibrácií pri obrábaní tenkostenných dielov a plne využiť schopnosti CNC obrábanicových centr je naléhavou potrebou pre pokročilé výrobné spoločnosti.
Výskum technológie kontroly deformácie tenkostenných častí s slabou tuhosťou pritiahnuje pozornosť inžinierov a výskumníkov už dlhší čas. V predchádzajúcej výrobnnej praxi ľudia často používali strategiu vodných čiar striedavého frézovania oboch strán tenkostenných štruktúr, čo môže istým spôsobom znížiť nepríznivé účinky deformácie a vibrácií na rozmernú presnosť. Okrem toho existuje aj spôsob, ako zvýšiť obrabovaciu pevnosť umiestnením predvyrobených obetných štruktúr, ako sú posilňovacie žebra.
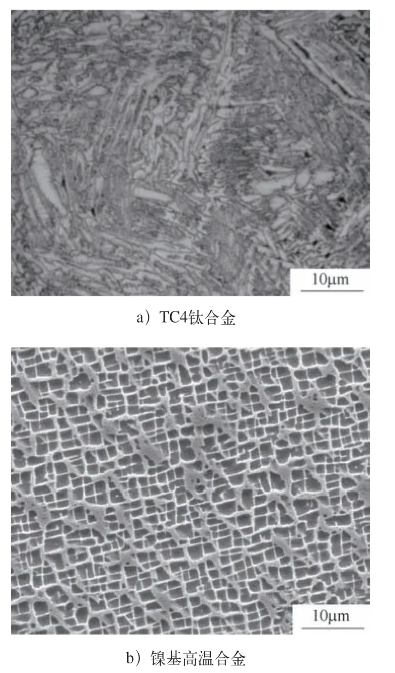
Aby sa splnili požiadavky na stabilné fungovanie v prostredí vysokých teplôt a tlakov, bežne používané materiály na lopatky letectvého motora sú titanové alebo vysokohtové ligatúry. V posledných rokoch sa titan-aluminové medziprízemné zlúčeniny stali tiež materiálom s veľkým aplikabilným potenciálom pre lopatky. Titanové ligatúry majú charakteristické vlastnosti, ako je nízka tepelná vodivosť, nízka plastickosť, nízky pružný modul a silná afinita, čo im spôsobuje problémy pri rezačnom procese, ako sú veľké rezačné sily, vysoká rezačná teplota, vážne pracovné ztvrdnutie a veľké opotrienie nástroja. Sú to typické ťažkopreparátovateľné materiály (mikroštruktúra viditeľná na obrázku 2a) [7]. Hlavné charakteristiky vysokohtových ligatúr sú vysoká plastickosť a pevnosť, zlá tepelná vodivosť a veľké množstvo hustej pevnovej riešenej fázy vnútri [8]. Plastická deformácia počas reza spôsobuje vážnu deformáciu krystalového sieťového priestoru, vysokú odporovosť deformácii, veľké rezačné sily a vážne javy studenej tvrdenia, čo sú tiež typické ťažkopreparátovateľné materiály (mikroštruktúra viditeľná na obrázku 2b). Preto je vyvíjanie efektívnych a presných technológií reza pre ťažkopreparátovateľné materiály, ako sú titanové a vysokohtové ligatúry, veľmi dôležité. Aby sa dosiahlo efektívne a presné opracovanie týchto ťažkopreparátovateľných materiálov, domáci aj zahraniční odborníci hlboko skúmajú inovačné metódy rezu, optimálne materiály pre rezačné nástroje a optimalizované parametre rezu.
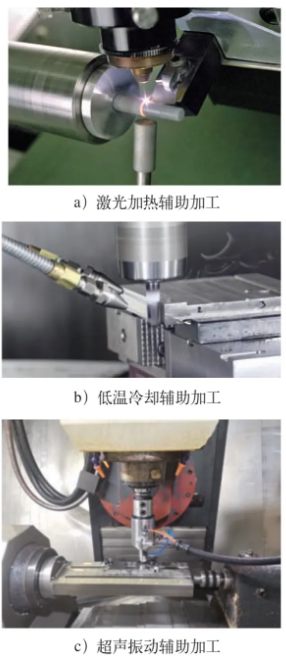
V oblasti inovatívneho výskumu a vývoja režiacich metód majú odborníci predstavili pomocné prostriedky, ako je laserové ohrievanie a kryogénne ochladzovanie, s cieľom zlepšiť opracovateľnosť materiálov a dosiahnuť efektívne režanie. Zásadný princíp laserového ohrievania prispôsobeného spracovania [9] (vidieť obrázok 3a) spočíva v tom, že sa zamietne vysokou mocnosťou laserový paprsek na povrch zväzku pred režiacim hroňom, čo zmäkkčí materiál lokálnym ohrievaním paprskom, zníži vydržiavosť materiálu, tým pádom zníži režnú silu a opotrebovanie nástroja a zlepší kvalitu a účinnosť režania. Kryogénne ochladzovanie prispôsobeného spracovania [10] (vidieť obrázok 3b) používa kapalný oxid uhličitý, vysokotlaký oxid uhličitý a iné ochladzovacie média, ktoré sa namietajú na režiacu časť, aby sa ochladilo režacie procesy, vyhli súbežnosti nadmerných lokálnych teplot spôsobených chudobnou tepelnou vodivosťou materiálu a urobí zväzok lokálne studený a kruchý, čím sa posilní efekt prelomenia střepy. Spoločnosť Nuclear AMRC vo Veľkej Británii úspešne použila vysokotlaký oxid uhličitý na ochladzovanie procesu spracovania titanových ligat. Porovnaním s suchým režaním ukazuje analýza, že kryogénne ochladzovanie prispôsobeného spracovania môže nie len znížiť režnú silu a zlepšiť kvalitu režanej plochy, ale aj účinne znížiť opotrebovanie nástroja a zvýšiť jeho životnosť. Okrem toho je ultrazvukové vibrácie prispôsobeného spracovania [11, 12] (vidieť obrázok 3c) tiež efektívnou metódou efektívneho režania ťažko spracovateľných materiálov. Aplikácia vysokofrekvenčných, maloamplitudových vibrácií na nástroj dosahuje medziodbornú separáciu počas procesu obrábania, čo zmení mechanizmus odstraňovania materiálu, posilní stabilitu dynamického režania, účinne vyhnutie sa treniu medzi nástrojom a obrábanou plochou, zníži režnú teplotu a režnú silu, zníži hodnoty hrubosti povrchu a zníži opotrebovanie nástroja. Jeho vynikajúce technologické účinky dostali širokú pozornosť.
Pre ťažko ťateľné materiály, ako sú titanové ligatúry, optimalizácia materiálov nástrojov môže efektívne vylepšiť výsledky reźby [8, 13]. Štúdie ukázali, že pri zpracovovaní titanových ligatúr je možné vybrať rôzne nástroje podľa rýchlosti zpracovania. Pri nízkych rýchlostiach sa používa vysoko kobaltová rýchlorezná ocele, pri stredných rýchlostiach sa používajú lemované karbídové nástroje s aluminiovou oxidovou patinou a pri vysokých rýchlostiach sa používajú nástroje z kubického boritu dušika (CBN); pre zpracovanie vysokoteplých ligatúr by sa mali používať vysoko vanádiem obsahujúce rýchlorezné oceľe alebo YG karbídové nástroje s vysokou tvrdošťou a dobrým odolnosťou prednosťou.
Rezacie parametre sú tiež dôležitým faktorom ovplyvňujúcim výsledok obrábania. Použitie vhodných rezacích parametrov pre príslušné materiály môže efektívne zlepšiť kvalitu a účinnosť obrábania. Vezmime si ako príklad parameter rýchlosti rezu, nízka rýchlosť rezu môže ľahko vzniknúť na povrchu materiálu oblasť nánosu hranice, čo snižuje presnosť obrábania povrchu; vysoká rýchlosť rezu môže ľahko spôsobiť akumuláciu tepla, čo môže spôsobiť opálenie práce a nástroje. V tejto súvislosti tím profesora Zhai Yuanshenga na Harbinskéj univerzite technológie a vied analyzoval mechanické a fyzikálne vlastnosti bežne používaných ťažko obrateľných materiálov a shrnul odporúčanú tabuľku rýchlostí rezu pre ťažko obrateľné materiály prostredníctvom ortogonálnych experimentov s obrábaním [14] (pozri Tabuľku 1). Použitie nástrojov a rýchlostí rezu odporúčaných v tabuľke pre obrábanie môže efektívne znížiť defekty pri obrábaní a vyčerpanie nástroja, a zlepšiť kvalitu obrábania.
V posledných rokoch, s rýchlym rozvojom leteckej prprene a narastajúcim trhovým dopytom, sa zvýšili požiadavky na efektívne a presné spracovanie tenkostenných lopatiek, pričom sa stáva naliehavejšou potreba vyššie presnejších techník kontroly deformácie. V kontexte inteligentných výrobných technológii, kombinácia modernej elektronickej informačnej technológie na dosiahnutie inteligentnej kontroly deformácie a vibrácií pri spracovaní lopatiek leteckého motora sa stala pre mnohých výskumníkov aktuálnym témem. Úvod inteligentných CNC systémov do presného spracovania komplexných kriviek lopatiek a aktívna kompenzácia chýb v procese spracovania na základe inteligentných CNC systémov môže efektívne potlačiť deformáciu a vibrácie.
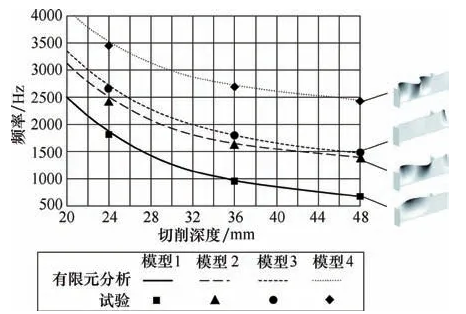
Pre aktívnu kompenzáciu chýb počas obrábania, s cieľom dosiahnuť optimalizáciu a kontrolu parametrov obrábania, ako je napríklad nástrojová trajectória, je potrebné najprv získať vplyv technologických parametrov na deformáciu a vibrácie pri obrábaní. Existujú dve bežne používané metódy: jedna je analyzovať a odvodiť výsledky jednotlivých prechodov nástroja pomocou merania na stroji a analýzy chýb [15]; druhá je vytvoriť predikčný model pre deformáciu a vibrácie pri obrábaní pomocou metód ako je dynamická analýza [16], modelovanie konečnými prvками [17], experimenty [18] a neurónové siete [19] (vidieť Obrázok 4).
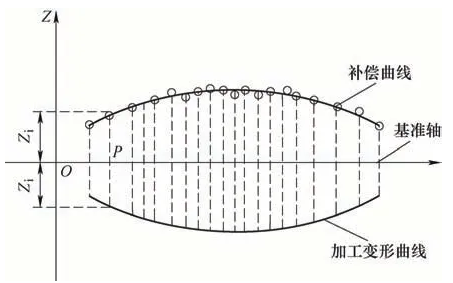
Na základe uvedeného predikčného modelu alebo merania na stroji môžu ľudia optimalizovať a dokonca ovládať technické parametre v reálnom čase. Hlavným smerom je kompenzácia chýb spôsobených deformáciou a vibráciou cez preplánovanie nástrojovej trajektórie. Bežne používaná metóda v tomto smere je „metóda zrkadlovej kompenzácie“ [20] (vidieť obrázok 5). Táto metóda kompenzuje deformáciu jednotlivého rezania korigenovaním menominalnej nástrojovej trajektórie. Však jediná kompenzácia môže vyvolávať nové deformácie pri rezaní. Preto je potrebné vytvoriť iteratívny vzťah medzi rezačnou silou a deformáciou pri rezaní prostredníctvom viacerých kompenzácií, aby sa deformácie odstránili postupne. Okrem metód aktívnej kompenzácie chýb založených na plánovaní nástrojovej trajektórie študujú mnohí vedci aj to, ako ovládať deformáciu a vibráciu optimalizáciou a kontrolou rezačných parametrov a parametrov nástroja. Pre reze určitého druhu lopatiek leteckého motora bolo vykonaných niekoľko série ortogonálnych testov s rôznymi rezačnými parametrami. Na základe údajov z týchto testov bola analyzovaná vplyv jednotlivých rezačných parametrov a parametrov nástroja na deformáciu pri rezaní lopaťov a vibráciu. Bola vytvorená empirická predikčná modela na optimalizáciu rezačných parametrov, čo efektívne znížilo deformáciu pri rezaní a potlačilo rezačnú vibráciu [21-23].
Na základe uvedených modelov a metód mnohé spoločnosti vyvinuli alebo vylepšili CNC systémy sústredných obrábaniecentier, aby dosiahli adaptívne riadenie v reálnom čase pripracovávacieho procesu tenkostenných dielov. Optimálny frézovací systém izraelskej spoločnosti OMAT [24] je typickým predstaviteľom v tejto oblasti. Hlavnou úlohou je prispôsobenie rýchlosti krmenia pomocou adaptívnej technológie na dosiahnutie cieľa konštantnej silovej frézovacej operácie a realizácia efektívneho a kvalitného obrábania komplexných výrobkov. Okrem toho spoločnosť Beijing Jingdiao aplikovala podobnú technológiu v klasickom technickom prípade dokončenia vytesávania vzorov na povrchu vejce prostredníctvom adaptívnej kompenzácie meraním na stroji [25]. THERRIEN zo spoločnosti GE v USA [26] navrhol metódu reálneho spracovania opravy CNC kódu počas obrábania, čo poskytlo základné technické prostriedky pre adaptívne obrábanie a reálny časový kontrol komplexných tenkostenných listov. Automatizovaný systém opravy turbínových komponentov leteckých motorov (AROSATEC) Európskej únie realizuje adaptívne presné frézovanie po oprave lopatiek additívnymi výrobnymi technológiami a už sa používa v produkčnom procese opravy lopaťov spoločnosti MTU v Nemecku a spoločnosti SIFCO v Írsku [27].
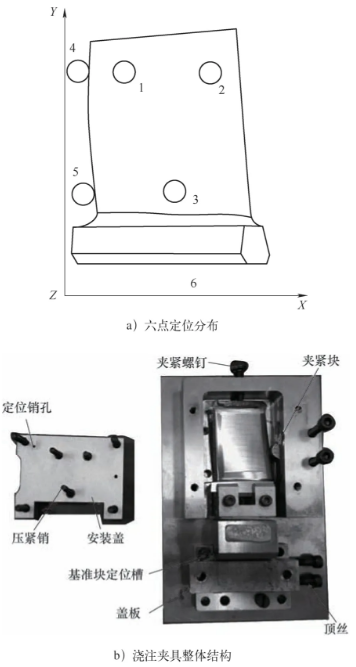
Použitie inteligentného procesového vybavenia na zlepšenie pevnosti procesového systému a vylepšenie tlmiacích charakteristík je tiež efektívny spôsob potlačenia deformácie a vibrácií pri obrábaniach tenkoštvrčatých lopatiek, zlepšenie obrábanostnej presnosti a kvality povrchu. V posledných rokoch bolo použité veľa rôznych typov procesového vybavenia na obrábanie rôznych druhov leteckomotorových lopaťov [28]. Keďže leteckomotorové lopatky majú obvykle štrukturálne vlastnosti tenkoštvrčatých a nepravidelných konštrukcií, malú plochu pre chytenie a polohovanie, nízku pevnosť pri obrábaní a miestnu deformáciu pod vplyvom rezacích záťaží, obrábanie vybavenia pre lopatky obvykle aplikuje pomocnú podporu na pracovnom kuse na základe šiestbodového princípu polohovania [29] na optimalizáciu pevnosti procesového systému a potlačenie deformácie pri obrábaní. Tenkoštvrčaté a nepravidelné krivé povrchy predkladajú dve požiadavky na polohovanie a chytenie nástrojov: prvá, sila chytenia alebo kontaktová sila nástroja by mala byť rozdelená čo najrovnopornejšie na krivom povrchu, aby sa vyhli seriózne miestne deformácie pracovného kuska pod vplyvom sily chytenia; druhá, polohovacie, chytace a pomocné podpory nástrojov musia lepšie zodpovedať komplexnému krivému povrchu pracovného kuska, aby v každom kontakte vznikla rovnomerná povrchová sila. Na reakciu na tieto dve požiadavky navrhli odborníci flexibilný systém nástrojov. Flexibilné systémy nástrojov sa dajú rozdeliť na fázové flexibilné nástroje a prispôsobivé flexibilné nástroje. Fázové flexibilné nástroje využívajú zmeny pevnosti a tlmenia pred a po fázovej zmene tekutiny: tekutina vo fáze kapaliny alebo mobilnej fáze má nízku pevnosť a tlmenie a môže sa prispôsobiť komplexnému krivému povrchu pracovného kuska pri nízkych tlakoch. Následne sa tekutina transformuje do pevnej fázy alebo je konsolidovaná vonkajšími silami ako elektrika/magnetizmus/teplo, pričom sa pevnosť a tlmenie výrazne zvýšia, čím poskytujú rovnomernú a pružnú podporu pracovnému kusu a potláčajú deformáciu a vibrácie.
Výrobné zariadenie v tradičnej technológii spracovania lopatiek letectvého motora používa ako vyplňovaciu pomocnú podporu materiály so fázovou prechodom, ako sú slitiny s nízkou teplotou tavenia. Teda, po tom, čo je hrubka dielu zaradená a stlačená v šiestich bodoch, sa referenčný systém dielu odlieva do odlievacieho bloku cez slitinu s nízkou teplotou tavenia, aby poskytla pomocnú podporu dielu, a komplexné bodové zaradenie sa prevádza na pravidelné povrchové zaradenie, a potom sa vykoná presná obrábacia operácia spracovávanej časti (vidieť Obrázok 6). Táto procesná metóda má zrejmé defekty: konverzia referenčného zaradenia spôsobuje zníženie presnosti zaradenia; pripravenie výroby je zložité, a odlievanie a tavenie slitín s nízkou teplotou tavenia spôsobujú aj problémy s nánosmi a čistením na povrchu dielu. Zároveň sú podmienky odlievania a tavenia relatívne nevhodné [30]. Aby sa vyriešili uvedené procesné defekty, bežnou metódou je zaviesť viacobodovú podporenú štruktúru kombinovanú s materiálom so fázovou prechodovou [31]. Horná časť podpornej štruktúry sa dotýka diela pre zaradenie, a dolná časť je imerzovaná v komore slitiny s nízkou teplotou tavenia. Na základe vlastností fázového prechodu slitín s nízkou teplotou tavenia sa dosahuje flexibilná pomocná podpora. Hoci zavedenie podpornej štruktúry môže predchádzať povrchovým defektom spôsobeným kontaktom slitín s nízkou teplotou tavenia s lopačkami, kvôli obmedzeniam vlastností materiálov so fázovou prechodovou, nemôžu fázové flexibilné nástroje súčasne spĺňať dve hlavné požiadavky - vysokú tupeň a rýchlu reakciu, a ich je ťažké aplikovať vo vysokoefektívnej automatizovanej výrobe.
Aby sa riešili nedostatky fázových zmien pružného nástroja, mnoho odborníkov začleňuje koncept prispôsobivosti do výskumu a vývoja pružných nástrojov. Prispôsobivé pružné nástroje môžu prispôsobiť zložité tvarom listov a možné chyby tvaru prostredníctvom elektromechanických systémov. Aby sa zabezpečilo, že kontaktná sila je rovnomerne rozdelená po celom listoch, nástroje obvykle používajú viacbodové pomocné podpory na vytvorenie podpornej matice. Tím Wang Hui z Univerzity Tsinghua navrhol viacbodové pružné pomocné podporné vybavenie pre zpracovanie blízkych k čistému tvaru lalok [32, 33] (vidieť obrázok 7). Nástroj používa viacero pružných držiacich prvku na podporu povrchu laloka s blízkym čistým tvarom, čo zvyšuje plochu kontaktu. každá plocha kontaktu a zabezpečenie, aby bolo tlmiace schopnosť rovnomerne rozdelené na každú časť kontaktu a celý list, čím sa vylepšuje tuhost procesového systému a účinne sa predchádza miestnej deformácii listu. Nástroj má viacero pasívnych stupňov voľnosti, ktoré môžu prispôsobiť tvar listu a jeho chyby, pričom sa vyhýbajú prekonaloceniu. Okrem dosiahnutia prispôsobivej podpory cez flexibilné materiály je aj princíp elektromagnetického indukovania použitý na výskum a vývoj prispôsobivého flexibilného nástroja. Tím Yang Yiqing na Univerzite leteckej a vesmírnej techniky v Pekingu vynalezli pomocnú podporu založenú na princípe elektromagnetického indukovania [34]. Nástroj používa flexibilnú pomocnú podporu, ktorá je stimulovaná elektromagnetickým signálom, čo môže meniť tlmiace vlastnosti procesového systému. Počas procesu zatlačovania sa pomocná podpora prispôsobí tvaru dielu pod vplyvom trvaleho magneta. Počas obrábania sa vibrácia vykonaná dielom preniesie na pomocnú podporu a podľa princípu elektromagnetického indukovania sa vyvolá opačná elektromagnetická sila, čím sa potlačí vibrácia pri obrábaní tenkostenných dielov.
Momentálne, v procese návrhu vybavenia na procesy sa obvykle používajú metódy ako konečná prvkom analýza, genetický algoritmus a iné na optimalizáciu rozloženia viacbodových pomocných podpôr [35]. Avšak výsledok optimalizácie môže zabezpečiť len minimalizáciu deformácie v jednom bode, nemôže však zaručiť rovnaký účinok potlačovania deformácie v iných častiach spracovávanej komponenty. V procese spracovania lopatiek sa bežne vykonáva séria nástrojových chodov na práciku na tej istej strojovacej jednotke, avšak požiadavky na záchytnú sústavu pri spracovaní rôznych častí môžu byť odlišné a dokonca časovo zmeniteľné. Pre statickú viacbodovú podporenú metódu, ak sa zvýši počet pomocných podpôr na zlepšenie pevnosti procesnej sústavy, zvýši sa hmotnosť a objem nástrojov, a navyše sa skomprimuje pohybové priestore pre nástroje. Ak sa pozícia pomocnej podpory resetuje pri spracovaní rôznych častí, nevyhnutne sa preruší spracovacia sekvencia a zníži sa efektívnosť spracovania. Preto boli navrhnuté nasledujúce technologické vybavenie [36-38], ktoré automaticky prispôsobuje rozloženie podpory a podpornú silu online podľa spracovacieho procesu. Nasledujúce technologické vybavenie (pozri obrázok 8) môže dosiahnuť dynamickú podporu cez koordinovanú spoluprácu nástroja a vybavenia na základe dráhy nástroja a zmien pracovných podmienok v časovo zmeniteľnom reze pred začatím ľubovoľnej spracovacej procedúry: najprv presunú pomocné podpory na pozíciu, ktorá pomáha potlačiť aktuálnu deformáciu spracovania, tak aby sa zabezpečila oblasť spracovania pripravená časť je aktívne podporená, zatiaľ čo ostatné časti pripravovanej časti zostávajú na mieste s čo najmenejším kontaktom, čím sa splnia časovo zmenlivé požiadavky na tlačenie počas spracovávacieho procesu.
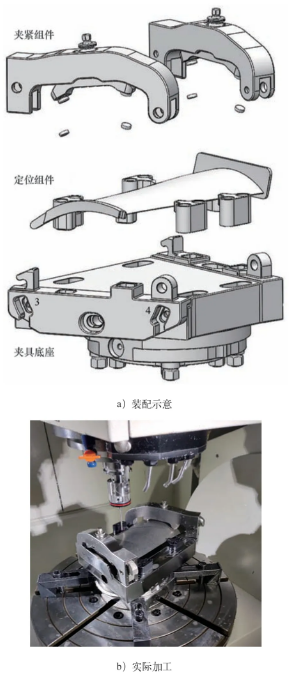
Pre zvýšenie schopnosti prispôsobivého dynamického podpory strojovacieho vybavenia, zhodnotenie viac komplexných držacích požiadaviek v procese spracovania a zlepšenie kvality a účinnosti produkcie pri spracovaní listov je následná pomocná podpora rozšírená do skupiny tvorené viacerými dynamickými pomocnými podporami. Každá dynamická pomocná podpora musí koordinovať činnosti a automaticky a rýchlo rekonštruovať kontakt medzi skupinou podpory a dielom podľa časovo premenlivých požiadaviek výrobného procesu. Rekonštrukčný proces nesmie interferovať s polohou celého dielu a nesmie spôsobiť miestne posuny alebo vibrácie. Strojovacie vybavenie založené na tomto koncepte sa nazýva samorekonfigurovaná skupinová držka [39], ktorá má výhody flexibility, rekonfigurovateľnosti a autonomy. Samorekonfigurovaná skupinová držka môže alokovať viacero pomocných podpor na rôzne pozície na podporennej ploche podľa požiadaviek výrobného procesu a dokáže sa prispôsobiť komplexne tvarovaným dielom s veľkou plochou, pričom zabezpečí dostatočnú pevnosť a eliminiuje nadbytočné podpory. Spôsob fungovania držky spočíva v tom, že riadiace zariadenie odosiela pokyny podľa programovaného programu a mobilná základňa presunie podporený prvok na cieľovú pozíciu podľa pokynov. Podporený prvok sa prispôsobí miestne geometrickému tvaru dielu, aby dosiahol flexibilnú podporu. Dynamické charakteristiky (tuhost' a tlmenie) kontaktnej oblasti medzi jednotlivým podporeným prvkom a miestnym dielom môžu byť ovládané zmenou parametrov podporeného prvku (napríklad hydraulický podporený prvok môže bežne meniť vstupný hydraulický tlak na zmenu kontaktových charakteristík). Dynamické charakteristiky systému spracovania vznikajú spojením dynamických charakteristik kontaktnej oblasti medzi viacerými podporenými prvками a dielom a súvisia s parametrami jednotlivých podporených prvkov a rozložením skupiny podporených prvkov. Dizajn rekonštrukčného plánu viac-bodovej podpory samorekonfigurovateľnej skupinovej držky musí brať do úvahy nasledujúcich tri problémy: prispôsobenie sa geometrickému tvaru dielu, rýchle prepozícia podporených prvkov a koordinovaná spolupráca viacerých podporných bodov [40]. Preto, keď sa použije samorekonfigurovaná skupinová držka, je potrebné použiť tvar dielu, nosné charakteristiky a vlastné hranicové podmienky ako vstup na riešenie viac-bodovej rozloženia podpory a podporných parametrov v rôznych spracovacích podmienkach, naplánovať pohybovú trajectóriu viac-bodovej podpory, vygenerovať riadiaci kód z výsledkov riešenia a importovať ho do riadiaceho zariadenia. V súčasnosti sa domácí aj zahraniční školy venovali niektorým výskumným prácam a pokusom sámrekonfigurovateľných skupinových držiek. Za hranicami bol v rámci európskeho projektu SwarmItFIX vyvinut nový vysoce prispôsobivý samorekonfigurovaný systém držiek [41], ktorý používa sadu mobilných pomocných podpor, ktoré sa môžu voľne pohybovať na stoličke a v reálnom čase prepozícirovat', aby lepšie podpísali spracovávané časti. Prototype systému SwarmItFIX bol v tejto projekte realizovaný (vidieť obrázok 9a) a otestovaný na mieste italskej leteckej výrobné spoločnosti. V Čine tímov Wang Hui na Univerzite Tsinghua vyvinul štyrbodovú stojaciu desku na chytanie a podporu, ktorá sa dá riadiť v súlade so strojom [42] (vidieť obrázok 9b). Táto deska môže podpísať výčnbeľové špony a automaticky vyhýbať sa nástrojovi počas jemného obrábania špony lopatky turbíny. Počas obrábania štyrbodová pomocná podpora spolupracuje s CNC obrábaním centrom, aby rekonštruovala štyrbodový stav kontaktu podľa polohy pohybu nástroja, čo ne len vyhýba interferencii medzi nástrojom a pomocnou podporou, ale tiež zabezpečuje efekt podpory.
Keď sa návrhové požiadavky na pomer tlačenia ku hmotnosti letectvého motora stále zvyšujú, počet častí sa postupne zníži a úroveň strese na častiach je čoraz vyššia. Výkon dvoch hlavných tradičných vysokoteplných štrukturálnych materiálov dosiahol svoje maximum. V posledných rokoch rýchlo rastie vývoj nových materiálov pre listy letectvého motora a čoraz viac vysoko výkonných materiálov sa používa na výrobu tenkostenných lalok. Medzi nimi patrí γ -TiAl aliancia[43], ktorá má vynikajúce vlastnosti, ako je vysoká špecifická pevnosť, odolnosť voči vysokým teplotám a dobrá oxidácia. Zároveň má hustotu 3.9g/cm3, čo je iba polovica hustoty vysokoteplných aliancií. V budúcnosti má veľký potenciál ako lalok v teplotnom rozsahu 700-800 ℃ . Hoci γ -TiAl kov má vynikajúce mechanické vlastnosti, ale jeho vysoká tvrdosť, nízka tepelná vodivosť, nízka odolnosť proti zlomu a vysoká kruchlosť spôsobujú slabú povrchovú integritu a nízku presnosť γ -TiAl materiálu po reze, čo vážne ovplyvňuje životnosť dieliek. Preto je výskum zpracovania γ -TiAl aliančného materiálu dôležitým teoretickým smermom a hodnotou, ktorý predstavuje dôležitý výskumný smer súčasnej technológie zpracovania lopatiek.
Lopatky turbo motorov majú komplikované zakrivené povrchy a vyžadujú vysokú presnosť tvaru. Momentálne ich presná obrába hlavne využíva geometrické prispôsobivé metódy obráby založené na plánovaní trasy a rekonštrukcii modelu. Táto metóda môže efektívne znížiť vplyv chýb spôsobených pozíciou, priazkovaním atď. na presnosť obráby lopatiek. Vplyv. Však kvôli nerovnomernosti hrúbky kovacej suroviny lopatiek sa pri obrábe podľa naplánovanej trasy v rôznych oblastiach nástroja líši hĺbka rezania, čo prináša neisté faktory do procesu rezania a ovplyvňuje stabilitu obráby. V budúcnosti by počas CNC prispôsobivej obráby mali byť lepšie sledované skutočné zmeny stavu obráby [44], čím sa významne zvýši presnosť obráby zložitých zakrivených povrchov a vznikne časovo zmeniteľná kontrolná prispôsobivá metóda obráby, ktorá prispôsobí parametre rezania na základe reálnych údajov spätného spojenia.
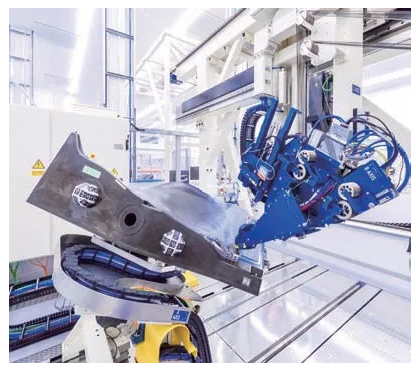
Jako najväčšia kategória komponentov v motore má efektivita výroby lopatiek priamy vplyv na celkovú výrobnú efektivitu motora a kvalita výroby lopatiek priamo ovplyvňuje výkon a životnosť motora. Preto sa inteligentné presné obrábanie lopatiek stalo smerom rozvoja výroby motorových lopatiek na svete dnes. Výskum a vývoj strojového zariadenia a technologického vybavenia je kľúčom k realizácii inteligentného obrábania lopatiek. S rozvojom technológie CNC sa úroveň inteligencie strojového zariadenia rýchlo zvyšovala a schopnosť obrábania a produkcie sa významne zvýšila. Preto je výskum, vývoj a inovácia inteligentného technologického vybavenia dôležitým smerom rozvoja pre efektívne a presné obrábanie tenkostenných lopatiek. Vysoce inteligentné CNC obrábací stroje kombinované s technologickým vybavením tvoria inteligentný systém na obrábanie lopatiek (vidieť Obrázok 10), ktorý realizuje presné, efektívne a prispôsobiteľné CNC obrábanie tenkostenných lopatiek.
 Horúce novinky
Horúce novinky2024-12-31
2024-12-04
2024-12-03
2024-12-05
2024-11-27
2024-11-26
Náš profesionálny predajný tím čaká na vašu konzultáciu.
 EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 SL
SL
 UK
UK
 VI
VI
 ET
ET
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 GA
GA
 IS
IS






