
Būdant svarbiu komponentu, kuris padeda pasiekti oro varomųjų variklių našumą, lopeliai turi tipinius charakteristikas, tokias kaip plonos sienos, specialios formos, sudėtingos konstrukcijos, sunkiu procesuojami medžiagai ir aukšti reikalavimai dėl apdirbimo tikslumo ir paviršiaus kokybės. Kaip pasiekti tikslų ir efektyvų lopelių apdirbimą – tai vienas iš pagrindinių iššūkių šiuo metu oro varomųjų variklių gamybos srityje. Analizuojant pagrindinius veiksnius, paveikiančius lopelių apdirbimo tikslumą, yra visapusiškai sumariuojamas dabartinis tyrime esančių lopelių tikslaus apdirbimo technologijų ir įrangos statusas, bei perspektyvuojama oro varomųjų variklių lopelių apdirbimo technologijų raidos kryptis.
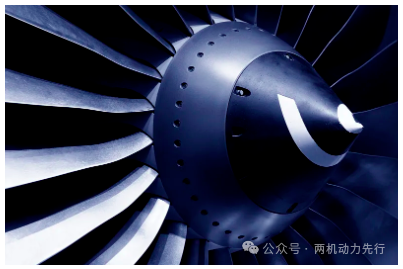
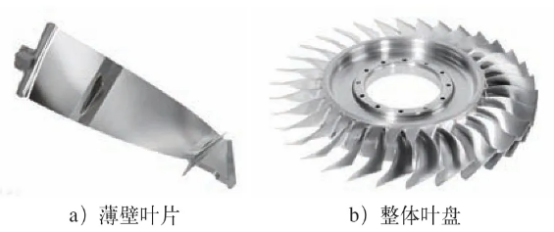
Gamtos erdvinėje pramoneje plačiai naudojami šviesūs, aukštos stiprumo plonios sienos dalys, kurios yra pagrindiniai komponentai siekiant įrengtinio, tokio kaip oro laivyno variklio, našumą [1]. Pavyzdžiui, didelio apiplytimo oro laivyno variklių titaninės aliejus sukimosi lopos (žr. paveikslį 1) gali būti iki 1 metro ilgio, su sudėtingomis lopų profiliais ir amortizavimo platformų struktūromis, o ploniausių dalių storis gali būti tik 1,2 mm, kuri yra tipiška didelio dydžio plonos sienos specialios formos detalė [2]. Kaip tipiška plonos sienos specialios formos silpnai jausminga detalė, lopa perdirbimo metu ypač lengvai kovoja su deformacijomis ir vibracijomis [3]. Šie problemos rimtai paveikia lopos perdirbimo tikslumą ir paviršiaus kokybę.
Gaminio našumas didžiausia dalimi priklauso nuo lopų gamybos lygio. Gaminio veikimo metu lopams reikia stabiliai dirbti ekstremaliose veikimo aplinkose, pvz., aukštoje temperatūroje ir aukštoje slėgime. Tai reiškia, kad lopų medžiaga turi turėti gera stiprumo, išlaidos priešinimo bei aukštos temperatūros korozijos priešinimo savybes ir užtikrinti struktūrinę stabilumą [2]. Paprastai lėktuvų variklių lopams naudojami titaninės aliejiaus arba aukštųjų temperatūrų aliejiai. Tačiau titaninės aliejiaus ir aukštųjų temperatūrų aliejiai yra mažai apdirbami. Apdirbimo metu pjovimo jėga yra didelė, o įrankis greitai skausdamas. Kai įrankio skausmas didėja, pjovimo jėga dar labiau padidės, dėl ko atsiranda daug rimtesnis apdirbimo deformavimas ir vibracijos, kuriuo rezultatu yra maža matmenų tikslumo ir blogas detalės paviršiaus kokybė. Norint atitikti variklio veikimo reikalavimus ekstremaliose darbo sąlygose, lopams būtina turėti labai aukštą apdirbimo tikslumą ir paviršiaus kokybę. Paimkime pavyzdį – titaninės aliejiaus vamzdyno lopus, naudojamus vietiniame aukštojo praleidimo santykio turbulinijų variklyje. Lopo bendras ilgis yra 681 mm, o jo storis mažesnis nei 6 mm. Profilio reikalavimai yra -0,12 iki +0,03 mm, o įeitas ir išėjimo kraštų matmenų tikslumas yra -0,05 iki +0,06 mm, lopo skerspjūvio sukimo klaida turi būti viduje ± 10′, ir paviršiaus rūbų reikšmė Ra yra geresnė nei 0,4 μ m. Tai dažniausiai reikalauja tikslaus gamybos ant penkių ašių CNC gaminimo įrankio. Tačiau, dėl lopos silpno šluosterio, sudėtingo struktūros ir sunkiu procesuojamųjų medžiagų, kad būtų užtikrinta gamybos tikslumas ir kokybė, technologai per gamybos procesą turi keisti pjovimo parametrus kelis kartus, kas rimtai apriboja CNC gaminimo centro galimybes ir sukelia didelį efektyvumo nuostolį [4]. Todėl, kartu su greitu CNC technologijų vystymusi, kaip pasiekti deformacijos valdymą ir vibracijų sunaikinimą stovyklių detalų gamyboje bei išskleisti visą CNC gaminimo centro potencialą tapo akiliniu poreikiu moderniems gamybos įmonėms.
Tyrimai apie deformacijos valdymo technologijas stiklaus sienelės silpnai gretimų dalių srityje ilgą laiką pritraukė inžinierių ir tyrintiųjų dėmesį. Ankstyvame gamybos praktikoje žmonės dažnai naudojo abiejų stiklaus sienelės pusių alternatyvinį miklajimo būdą, kuris iš esmės gali sumažinti deformacijos ir sukimosi neigiamą poveikį matmenų tikslumui. Be to, yra ir kitas būdas – padidinti procesavimo tvirtumą, nustatydami paruoštus sacrifikuojamus konstrukcinius elementus, pvz., stiprinančias ripas.
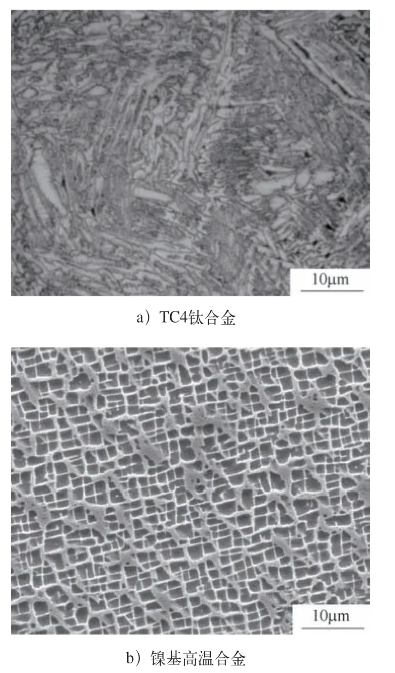
Norint atitikti aukštos temperatūros ir aukštos slėgio aplinkos stabilios paslaugos reikalavimus, dažniausiai naudojami avioninio variklio lapeliai yra titano aliejai arba aukštų temperatūrų aliejai. Naujausiais metais titano-aliuminio tarpmetalis tapo lapelių medžiaga su dideliu taikymo potencialu. Titano aliejai turi tokius charakteristikas kaip žemas šiltnamio laidumas, žala plastiskumas, žalias elastingumo modulis ir stiprus pripjautis, dėl kurių jie turi problemų, tokias kaip didelė pjovimo jėga, aukšta pjovimo temperatūra, griežtas darbo tvirtinimas ir didelis įrankio išnaša per pjovimą. Jie yra tipiški sunkiai pjovimi medžiagos (mikrostruktūros formos žr. paveikslą 2a) [7]. Aukštų temperatūrų aliejų pagrindinės charakteristika yra aukštas plastiskumas ir stiprumas, blogas šiltnamio laidumas ir didelis tankus solidavimas viduje [8]. Plastinis deformavimas per pjovimą sukelia griežtą tinklo iškraipydumą, aukštą deformacijos priešinį, didelę pjovimo jėgą ir griežtą šaldymo tvirtinimo reiškinį, tai taip pat yra tipiškos sunkiai pjovimosios medžiagos (mikrostruktūros forma žr. paveikslą 2b). Todėl ypač svarbu sukurti efektyvias ir tikslias pjovimo technologijas sunkiai pjovimoms medžiagoms, tokias kaip titano aliejai ir aukštų temperatūrų aliejai. Siekdami pasiekti efektyvų ir tikslų sunkiai pjovimoms medžiagoms pjovimą, mokslininkai iš viso pasaulio atliko giliausias tyrimus inovatyvios pjovimo būdų, optimalių pjovimo įrankių medžiagų ir optimizuotų pjovimo parametrų požiūriu.
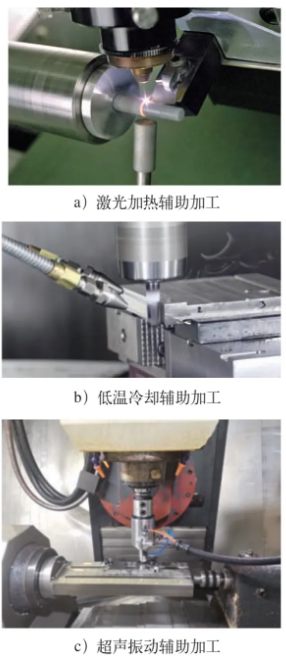
Kalbant apie inovacinių tyrimų ir kirtimo metodų plėtrą, mokslininkai pateikė papildomus būdus, tokious kaip laserio šiluminimas ir cryogeninis šaldo, siekdami pagerinti medžiagų kirtimą ir pasiekti efektyvesnį kirtimą. Laserio šiluminiu procesu pagalba [9] (žr. paveikslą 3a) yra susitelkinta galingas laserio spindulys ant darbo paviršiaus prieš kirtimo aukštą, kuris lokalizuotai išsilieja medžiagą, sumažina jos traukimą ir tuo būdu sumažina kirtimo jėgą bei įrankio išlaidą, taip pat gerina kirtimo kokybę ir efektyvumą. Cryogeninis šaldymo procesas pagalba [10] (žr. paveikslą 3b) naudoja skystą nitrogeną, aukštos slėgio anglies dioksido dujų ar kitus šaldymo agentus, kad juos spraudžia ant kirtimo vietos, šaldant kirtimo procesą, išvengiant problemas dėl per didelio vietinio kirtimo temperatūros didejimo dėl blogos medžiagos šilumos laidumo, padarant darbo objektą vietiniu šaltu ir krūstesniu, todėl stiprina ženklų trūkimo efektą. Britanijos bendrovė Nuclear AMRC sėkmingai naudojo aukštąsias slėgį turinčius anglies dioksido dujas šaldyti titaninio aljavolio apdirbimo procesą. Palyginti su sausuoju kirtimu, analizė rodo, kad cryogeninis šaldymo procesas ne tik sumažina kirtimo jėgą ir gerina kirtimo paviršiaus kokybę, bet ir efektyviai sumažina įrankio išlaidą, padedant ilgesniame laike naudoti įrankį. Be to, virpamasis ultragarsas pagalba apdirbimui [11, 12] (žr. paveikslą 3c) taip pat yra veiksmingas būdas sunkiomis apdirbti medžiagomis efektyviai kirsti. Taikant aukštąją dažnumo ir mažą amplitudę virpimus įrankiui, kirtimo metu pasiekiamas tarpo tarp įrankio ir darbo objekto pokytis, kuriuo keičiamas medžiagos nuimimo mechanizmas, stiprina dinaminio kirtimo stabilumą, efektyviai išvengia trikčių tarp įrankio ir apdirbtos paviršiaus, sumažina kirtimo temperatūrą ir jėgą, sumažina paviršiaus rūgštį reikšmes ir įrankio išlaidą. Jo puikūs technologiniai efektai gavo plačią dėmesį.
Sudėtingoms pjauti medžiagoms, pvz., titaninėms aliejuijoms, įrankių medžiagų optimizavimas gali efektyviai pagerinti pjovimo rezultatus [8, 13]. Tyrimai rodo, kad titaninių aliejų apdorojimui galima pasirinkti skirtingus įrankius pagal apdorojimo greitį. Lėtajam pjovimui naudojama aukštos kobalto kiekiu turinti aukštojo speedo plieno, vidutiniu greičiu – cementuoti karburo forto įrankiai su degulo oksido sluoksniumi, o didelio greičio pjovimui – kubinis bormis (CBN) įrankiai; aukšt temperatūros aliejų apdorojimui rekomenduojama naudoti aukštos vanadio kiekiu turinčią aukštojo speedo plieno arba YG cementuotus karburo forto įrankius su aukšta tvirtve ir gera izlaidingumo gebėjimu.
Ištraukos parametrai taip pat yra svarbus veiksnys, kuris įtakoja apdirbimo rezultatą. Naudojant tinkamus ištraukos parametrus atitinkamoms medžiagoms, galima efektyviai pagerinti apdirbimo kokybę ir efektyvumą. Imkime pavyzdžiui ištraukos greičio parametrą: mažas ištraukos greitis gali lengvai sukelti užsisklaidžiusio krašto sritį medžiagos paviršiuje, sumažindamas paviršiaus apdirbimo tikslumą; didelis ištraukos greitis gali lengvai sukelti šilumos akumuliaciją, kas sukelia darbo dalies ir įrankio degesius. Šiuo požiūriu Harbinos technologijų ir mokslo universiteto docento Zhai Yuanshengo komanda analizavo mechanines ir fizines savybes dažnai naudojamų sunkiai apdirbančių medžiagų ir per ortogonalias apdirbimo eksperimentus sudarė rekomendacijų lentelę dėl sunkiai apdirbančių medžiagų ištraukos greičių [14] (žr. lentelę 1). Naudodami lenteles pateiktus įrankius ir ištraukos greičius, galima efektyviai sumažinti apdirbimo defektus ir įrankio ausdymą, taip pat pagerinti apdirbimo kokybę.
Neseniais metais, kartu su oro pramonės greitu vystymusi ir augančiu rinkos poreikiu, didėja reikalavimai dėl aukštos našumo ir tikslumo plonų lopų apdorojimo, o poreikis aukštesnių tikslumo deformacijų valdymo technologijų tampa akilaukiam. Inteligentinių gamybos technologijų kontekste, jungiant šiuolaikinę elektroninę ir informacinę technologiją, kad būtų pasiektas oro variklių lopų apdorojimo deformacijos ir smegenų inteligentinis valdymas, tai taps daugelio tyrėjų aktualia tema. Įvedant inteligentinius CNC sistemos tikslumui apdorojant sudėtingus lopų kreivius paviršius bei aktyviai kompensuodami apdorojimo procese kilusias paklaidas remiantis inteligentine CNC sistema, galima efektyviai sunaikinti deformaciją ir smegenis.
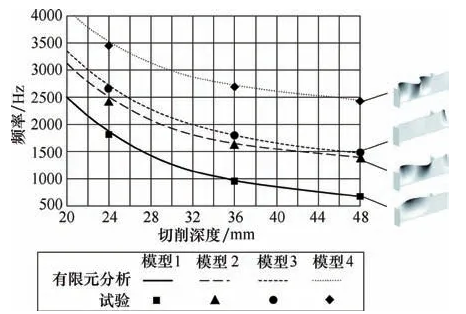
Sukūdami aktyvų klaidų kompensavimą gamybos procese, siekiant pasiekti gamybos parametrų, tokių kaip įrankio trajektorija, optimizavimą ir kontrolę, pirma reikia gauti technologinių parametrų poveikį gamybos deformacijai ir vibracijoms. Yra du plačiai naudojami metodai: vienas yra analizuoti ir argumentuoti kiekviename įrankio einame matomus rezultatus per ant stalo matymą ir klaidų analizę [15]; kitas – sukurti gamybos deformacijos ir vibracijų prognozavimo modelį naudojant metodus, tokiais kaip dinaminė analizė [16], baigtinių elementų modeliavimas [17], eksperimentai [18] ir neuroniniai tinklai [19] (žr. paveikslą 4).
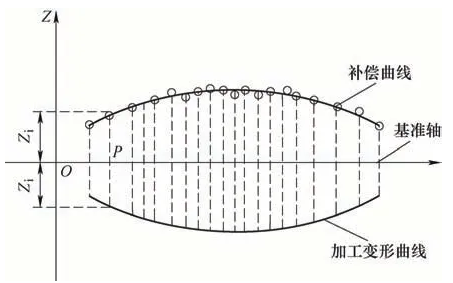
Remiantis aukščiau paminėtu prognozavimo modeliu arba stovinančios mašinos matavimo technologija, žmonės gali optimizuoti ir net valdyti gamybos parametrus realiu laiku. Pagrindinis kryptis yra kompensuoti deformacijos ir vibracijas, iš naujo planuodami įrankio trajektoriją. Šiame kelyje dažnai naudojamas „lygumo kompensacijos metodas“ [20] (žr. paveikslą 5). Šis metodas kompensuoja vieno šliuzymo deformaciją, pataisant nominalią įrankio trajektoriją. Tačiau viena kompensacija gali sukelti naujas gamybos deformacijas. Todėl reikia nustatyti iteracinę ryšį tarp šliuzymo jėgos ir gamybos deformacijos per kelis kompensacijos etapus, kad pataisyti deformacijas po vieną. Kartu su aktyviu klaidų kompensacijos metodu, paremtu įrankio trajektorijos planavimu, daugelis mokslininkų tyrinėja, kaip valdyti deformaciją ir vibracijas, optimizuodami ir kontroliuodami šliuzymo parametrus ir įrankio parametrus. Atlikus ortogonalinius bandymus su keitimais gamybos parametrams tam tikros tipo oro variklio lapo šliuzymui, remiantis bandymų duomenimis, buvo analizuojama kiekvieno šliuzymo parametro ir įrankio parametro įtaka lapo šliuzymo deformacijoms ir vibracijų atsakymams [21-23]. Buvo sukurtas empirinis prognozavimo modelis, skirtas optimizuoti gamybos parametrus, efektyviai sumažinti šliuzymo deformacijas ir sustabdyti šliuzymo vibracijas.
Remiantis minėtais modeliais ir metodais, daugelis įmonių tobulino arba sukūrė CNC sistemos CNC gabenimo centrui, siekdamos pasiekti realaus laiko pritaikomą valdymą gabentinių detalų apdirbimo parametrams. Izraelyje esančios OMAT kompanijos optimalus gabenimo sistemą [24] galima laikyti tipiniu atstovu šioje srityje. Ji pagrindiniu būdu reguliuoja traukimą naudojant pritaikomą technologiją, kad pasiektų konstantaus spaudimo gabenimą ir užtikrintų aukštos kokybės ir efektyvumą sudėtingų produktų apdirbimui. Be to, Pekino Jingdiao taip pat pritaikė panašią technologiją klasikinėje techninėje byloje, kurioje buvo įgyvendinta kiaušinių skersmenų paviršiaus raiška su jausmų prievokavimu pritaikomojo kompensavimo metodu [25]. JAV GE THERRIEN [26] pasiūlė realaus laiko korrekcijos metodą CNC kodams per apdirbimą, kuriuo buvo suteiktas pagrindinis techninis priemonės pritaikomam apdirbimui ir sudėtingoms gabentinioms lapeliams valdyti realiu laiku. Europos Sąjunga sukūrė oro variklių turbinos dalių automatinę taisyklų sistemą (AROSATEC), kuri realizuoja pritaikomą tikslų gabenimą po to, kai lapelės buvo atnaujintos naudojant addityvinę gamybą, ir jau yra pritaikyta Vokietijos MTU ir Airijos SIFCO lapelių atnaujinimo gamybai [27].
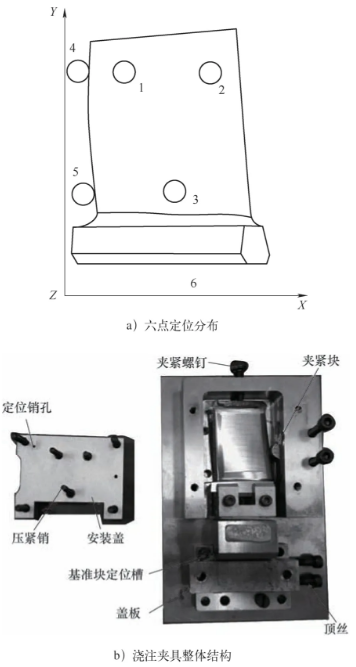
Naudojant inteličią procesų įrangą, galima pagerinti procesų sistemos tvirtumą ir dėmenų savybes, kuri yra taip pat veiksmingas būdas kontroliuoti deformatavimą ir virpamą stiebinių skerspjūvių apdirbimo metu, padidinti apdirbimo tikslumą ir gerinti paviršiaus kokybę. Paskutiniu metu buvo naudojama didelė įvairių tipų oro varomų lopų apdirbimui skirta įvairių procesų įranga [28]. Kadangi oro varomieji lopai dažnai turi stalo sienų ir netvarkingų konstrukcijos charakteristikų, mažą fiksavimo ir pozicionavimo plotą, žemas apdirbimo tvirtumą bei vietinį deformavimą dėl pjovimo apkrovos veikimo, lopų apdirbimo įranga paprastai pritaiko pagalbinį palaikymą darbiniui elementui, tenkinant šešių taškų pozicionavimo principą [29], siekdama optimizuoti procesų sistemos tvirtumą ir sustabdyti apdirbimo deformaciją. Stalos sienos ir netvarkingi išlenktiniai paviršiai kelia du reikalavimus įrankių pozicionavimui ir fiksavimui: pirmiausia, įrankio fiksavimo jėga arba kontaktinė jėga turėtų būti pasiskirstytos kaip galima lygiagrečiau ant išlenktinio paviršiaus, kad išvengtume rimto vietinio darbiniame elemente deformavimosi fiksavimo jėgos veikimo metu; antra, įrankio pozicionavimo, fiksavimo ir pagalbinio palaikymo elementai turi geresnai atitikti darbiniame elemente esančią sudėtingą išlenktinę formą, kad kiekvienoje susijungimo taške būtų sukurtas vienodas paviršiaus kontaktinės jėgos. Atsakydami į šias dvi reikalavimus, mokslininkai pasiūlė flexibilųjį įrankių sistemą. Flexibiliosios įrankių sistemos gali būti padalintos į fazinių pokyčių flexibilias įrangas ir pritaikomąsias flexibilias įrangas. Fazinių pokyčių flexibili įranga naudoja stygumo ir dėmenų pokytus prieš ir po skysčio fazės pakeitimo: skysčio fazė ar judrioji fazė turi mažą stygumą ir dėmenis, o ji gali pritaikytis darbiniame elemente esančiam sudėtingam išlenktiniam paviršiui žemuoju spaudimu. Vėliau skysčius paverčiama kietąja faze arba sujungiami išoriniais pajėgais, tokiais kaip elektros/magnetizmo/šilumos, dėl ko jų stygumas ir dėmėjimas gali būti gana padidinti, tuo tarpu užtikrinant vienodą ir flexibilųjį darbiniame elemente palaikymą bei deformacijos ir virpamų kontrolę.
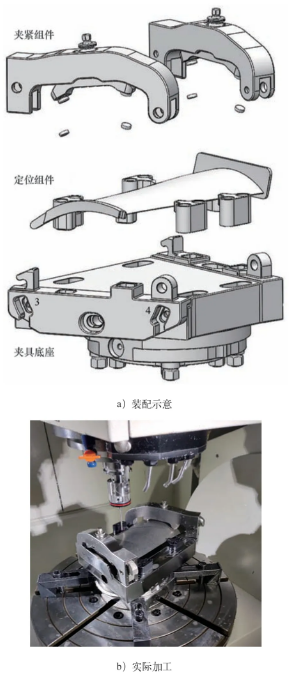
Aparatūra tradiciniame orošipio variklio lopų apdirbimo technologijoje yra naudojama fazių pakeitimo medžiaga, tokia kaip žemos šiltnamio lyginės aliejiai, kaip pilinimo pagalbinis palaikymas. Tai reiškia, kad po darbo detalės suvaldytojo įsikūrimo ir sufikimo šešiuose taškuose, darbo detalės padėties nuoroda yra išlieta į leistinį bloką naudojant žemos šiltnamio lyginę aliejį, kad būtų užtikrintas darbo detalės pagalbinis palaikymas, o sudėtingas taškinis įsikūrimas yra konvertuojamas į reguliarią paviršiaus įsikūrimą, o tada vykdoma apdirbamos dalies tikslus apdirbimas (žr. paveikslą 6). Ši technologijos metodas turi aiškius trūkumus: padėties nuorodos konversija lemia padėties tikslumo mažėjimą; gamybos paruošimas yra sudėtingas, o žemos šiltnamio lyginės aliejies lietinys ir smeltinys taip pat kelia liekanų ir darbo detalės paviršiaus valymo problemas. Taip pat lietinio ir smeltinio sąlygos yra gana blogos [30]. Norint išspręsti aukščiau minėtus technologinius trūkumus, dažnai vartojamas būdas yra pritraukti daugiataškio palaikymo struktūrą, jungtą su fazių pakeitimo medžiaga [31]. Palaikymo struktūros viršutinis galas susieja su darbo detalimi dėl įsikūrimo, o apačioje jis yra nuleistas į žemos šiltnamio lyginės aliejies kambarį. Pagal žemos šiltnamio lyginės fazinių pakeitimų savybes pasiekiamas lankstus pagalbinis palaikymas. nors palaikymo struktūros pritraukimas gali išvengti paviršiaus defektų, kuriuos sukuria žemos šiltnamio lyginės aliejies susilietimas su lopais, dėl fazių pakeitimo medžiagų savybių ribotumo, fazinių lankstumų negalima vienareikšmiškai atitikti dviejų pagrindinių reikalavimų – aukštos stygių ir greito reakcijos spartos – todėl ji sunkiai taikoma aukštos efektyvumo automatizuotoje gamyboje.
Norint išspręsti fazių pakeitimo lankstaus įrankio trūkumus, daugelis mokslininkų įtraukė pritaikomumo konceptą į lankstų įrangos tyrimo ir plėtros procesą. Pritaikomoji lanksta įranga gali pritaikytinai sutampančiai atitikti sudėtingus šilpno formuotus ir galimus formos klaidas per elektromechanines sistemas. Norint užtikrinti, kad kontaktinis jėga būtų tolygiai paskirstyta visame šilpne, įranga paprastai naudoja daugiau taškinių pagalbinio palaikymo elementų, kurie suformuoja palaikymo matricą. Šiaurės Vakarų Universiteto komanda, vadovaujama Wang Hui, pasiūlė daugiataškinę lankstų pagalbinį palaikymo technologinę įrangą, pritaikingą šilpnių apdorojimui artimos formos [32, 33] (žr. paveikslą 7). Įranga naudoja kelis lankstus medžiagos sustiprinimo elementus, padedančius palaikyti artimos formos šilpnio paviršių, didinant kontaktinę sritį. kiekvieną sąlyginę zoną ir užtikrinant, kad suliejimo jėga būtų lygiai paskirstyta tarp kiekvieno sąlyginio elemento ir visos lopos, taip pat gerindama procesinių sistemų stygumą ir efektyviai prevencijuojant lokalų lopos deformaciją. Įrankis turi kelis neaktyvius laisvumo laiptus, kurie gali pritaikytinai atitikti lopos formą ir jos nuokrypius, išvengiant pernelygios pozicijavimo. Be to, pritaikomasis palaikymas pasiekiama naudojant ginkląsnius medžiagas, taip pat yra pritaikytas elektromagnetinis indukcijos principas, skirtas pritaikomųjų ginklų kūrimui. Pekino oro ir kosmosaus universiteto komanda, vadovaujama Yang Yiqing, išrado pagalbinią palaikymo priemonę, paremtą elektromagnetinio indukcijos principu [34]. Įrankis naudoja ginklus, kurie yra sukaupti elektromagnetiniu signalu, kurie gali keisti procesinių sistemų amortizavimo savybes. Suliejimo metu pagalbinis palaikymas pritaikytinai atitinka darbo dalies formą dėl pastovaus magneto veiksmo. Per apdorojimą, darbo dalies sukeltas vibracijos bus perduotos pagalbiniam palaikymui, o pagal elektromagnetinio indukcijos principą bus sukurtas atvirkštinis elektromagnetinis jėgos momentas, todėl bus sumažintas plonų sienų darbo dalies apdorojimo vibravimas.
Šiuo metu, procesinių įrangų projektavimo procese paprastai naudojami baigtinių elementų analizės, genetinio algoritmo ir kitų metodų, kad būtų optimizuojamas daugiataškio pagalbinio palaikymo išdėstymas [35]. Tačiau optimizacijos rezultatas dažnai gali užtikrinti, kad deformacija viename taške bus sumažinta, bet negali užtikrinti to paties efekto kituose apdirbamosios dalies vietose. Lopų apdirbimo procese kartais atliekama serija rankinių judesnių su dirbtuviu ant to paties stalo, tačiau skirtingų dalių apdirbimui reikalingi skiriasi fiksavimo reikalavimai, kurie gali netgi būti laiko priklausomi. Statiniam daugiataškiui palaikymo būdams, jei procesinio sistemos sunkumą padidinsime didindami pagalbiškų palaikymo taškų skaičių, viena vertus, padidės dirbtuvo masė ir tūris, o kita vertus, suspaudžiamas bus dirbtuvo judesio erdvė. Jei apdirbant skirtingas dalis reikia nustatyti naują pagalbinio palaikymo poziciją, apdirbimo procesas nevyraus vengiant nutraukimų ir mažinant apdirbimo efektyvumą. Todėl buvo pasiūlyta sekanti procesinė įranga [36-38], kuri automatiškai pritaiko palaikymo išdėstymą ir jėgą pagal apdirbimo procesą. Sekanti procesinė įranga (žr. paveikslą 8) gali pasiekti dinaminį palaikymą dirbtuvu ir dirbtuviais sinchronizuotai bendradarbiaujant, remiantis dirbtuvo trajektorija ir darbo sąlygų pokyčiais laiko priklausomoje pjovimo proceso metu: pirmiausia perkeliami pagalbiniai palaikymai į poziciją, kurioje jie padeda sumažinti esamą apdirbimo deformaciją, kad apdirbimo zonos darinys yra aktyviai palaikomas, tuo tarpu darinio kitos dalys lieka vietoje su kuo mažiausiu kontaktau, taip atitinkant procesavimo metu keičiančias čempimties reikalavimus.
Norint dar labiau patobulinti procesinių įrenginių adaptacinį dinaminį palaikymo gebėjimą, atitinkamai pritaikyti sudetingesniems stebčiavimo reikalavimams per apdirbimo procesą ir pagerinti lopų apdirbimo gamybos kokybę ir efektyvumą, sekos pagalbinis palaikymas išplėstas į grupę, sudarytą iš kelių dinaminių pagalbių palaikymų. Kiekvienas dinaminis pagalbinis palaikymas privalo koordinuoti veiksmus ir automatiškai greitai persukurti ryšį tarp palaikymo grupės ir darbo dalies pagal gamybos proceso laiko kintamus reikalavimus. Persukūrimo procesas nesudaro jokio įtakos visai darbo daliui esant tinkamai pozicijuojamoms ir neatkuria vietinio poslinkio ar virpavimo. Procesinių įrenginių, pagrįstų šiuo konceptu, vadinama „savojuodami grupės fiksatoriai“ [39], kurie turi pranašumus, tokius kaip lankstumas, persukamosumas ir autonomija. Savojuodamas grupės fiksatorius gali paskirstyti kelis pagalbių palaikymus į skirtingas pozicijas palaikomame paviršiuje pagal gamybos proceso reikalavimus ir gali pritaikytis prie sudėtingos formos darbo dalių su dideliu platu, tuo pačiu užtikrinant pakankamą stygumą ir išskyrus keletą palaikymų. Fiksatoriaus darbo būdas yra tas, kad valdiklis siunčia instrukcijas pagal programuotą programą, o judanti bazė praneša palaikymo elementą į tikslinę poziciją pagal instrukcijas. Palaikymo elementas pritaiko save prie vietinio darbo dalių geometrijos elemento, siekdamas suderintino palaikymo. Kontaktuotojo tarp vieno palaikymo elemento ir vietinio darbo elemento dinaminės charakteristikos (styga ir amortizavimas) gali būti kontroliuojamos keičiant palaikymo elemento parametrus (pvz., hidraulinis palaikymo elementas paprastai gali keisti įvestą hidraulinę slaptį, kad pakeistų kontaktinių charakteristikų). Procesinių sistemų dinaminės charakteristikos formuojamos susiejant kelio palaikymo elementų ir darbo dalių kontaktinių zonų dinamines charakteristikas ir susijusios su kiekvienu palaikymo elemento parametrais bei palaikymo elemento grupės išdėstymu. Daugiapunktinio palaikymo persukūrimo schema savojuodamojo grupės fiksatoriaus projektavimui turėtų atsižvelgti į tris problemas: derintis su darbo dalių geometrijos forma, greitai pervietinant palaikymo elementus ir daugelio palaikymo taškų koordinuota bendradarbia. Todėl naudojant savojuodamąjį grupės fiksatorių, reikia naudoti darbo dalių formą, apkrovos charakteristikas ir pradinę ribinę sąlygą kaip įvestį, kad išspręstų daugiapunktinio palaikymo išdėstymą ir palaikymo parametrus skirtingose apdirbimo sąlygose, planuotų daugiapunktinio palaikymo judėjimo kelią, generuotų valdymo kodą iš sprendimo rezultatų ir importuotų jį į valdiklį. Šiuo metu nacionaliniai ir tarptautiniai mokslininkai atliko tam tikrą tyrimų ir bandymų darbą su savojuodamaisiais grupės fiksatoriais. Užsienioje ES projektas SwarmItFIX sukūrė naują labai pritaikomą savojuodamąjį fiksatoriaus sistemą [41], kuri naudoja rinkinį judančių pagalbių palaikymų, laisvai judančių ant darbo stalčio ir realiu laiku pervietinančių, kad geriau palaikytų apdirbančias detalės. SwarmItFIX sistemos prototipas buvo įgyvendintas šiame projekte (žr. paveikslą 9a) ir patestuotas Italijos oro transporto gamintojo serveryje. Kinijoje Qinghuos universiteto Wang Hui komanda sukūrė keturipunktinį stebčiavimo palaikymo darbo stalą, kurį galima valdyti jungiant su stribainiu [42] (žr. paveikslą 9b). Šis darbo stalas gali palaikyti išleistą rankšluostį ir automatiškai vengti įrankio per turbinos lopos rankšluosties tikslinę apdirbimą. Apdirbimo metu keturipunktinis pagalbinis palaikymas dirba kartu su CNC apdirbimo centru, persukurdamas keturipunktinį kontaktinį būseną pagal įrankio judėjimo vietą, todėl ne tik vengia įtampų tarp įrankio ir pagalbinio palaikymo, bet ir užtikrina palaikymo efektą.
Kai lėktuvų variklių jėgos dėsnio projektavimo reikalavimai kartu su didėjančiu jėgos dėsnio santykiu, dalių skaičius mažėja, o dalių stresas vis didesnis ir didesnis. Dviejų pagrindinių tradicinių aukštos temperatūros konstrukcinės medžiagos savybės pasiekė savo ribą. Nesenai, lėktuvų variklių lapelių naujoms medžiagoms greitai vystytis, ir vis daugiau aukštos našumo medžiagų naudojama gaminti stiklaus sienelės lapelius. Tarp jų, γ -TiAl lyginys[43] turi puikius savybes, tokias kaip aukštas specifinis stiprumas, aukštųjų temperatūrų išskyrimasis ir gera oksidacijos atsparumas. Taip pat jo tankis yra 3.9g/cm3, kas sudaro tik puse aukštųjų temperatūrų lyginio. Ateityje jis turi didelę potencialą kaip lapelis temperatūros diapazone nuo 700 iki 800 ℃ . Nors γ -TiAl lyginis turi puikias mechanines savybes, tačiau jo aukštas tvirtumas, žemas šilumos laidumas, žema suolis ir aukšta traukinamoji stygiausumo padaro blogą paviršiaus būklę ir mažą tikslumą γ -TiAl medžiagos perpjauti, kas rimtai paveikia dalių našumą. Todėl γ -TiAl lyginio apdorojimo tyrimas yra svarbus teorinis aspektas ir vertingas, o tai yra vienas iš svarbių dabartinio skerso technologijos tyrimo krypčių.
Laidinės varomosios lopų lapai turi sudėtingus išlenktus paviršius ir reikalauja aukštos formos tikslumo. Šiuo metu jų tikslus grybimas pagrįstas geometrijos pritaikymo technologijomis, kurios remiasi maršrutizacijos planavimu ir modelio atstatymu. Ši metodika gali efektyviai sumažinti klaidų poveikį, sukeltą pozicionavimo, sufiksojimo ir pan. veiksnių, įtakojančių lopų grybimo tikslumą. Tačiau dėl nerodrijo šabloninio ledo lopų biliono storio, įvairiuose grybimo procese esančiuose srityse įrankio grybimo gylis skiriasi pagal planuotą maršrutą, o tai kelia nustatytų veiksnių neapibrėžtumą grybimo procese ir paveikia apdorojimo stabilumą. ateityje CNC pritaikomojo grybimo procese reikėtų geriau stebėti tikrąjį grybimo būsenos pokyčius [44], todėl galima ryškiai pagerinti sudėtingų išlenktų paviršių grybimo tikslumą ir sukurti laiko priklausomą kontrolę pritaikomojo grybimo metodu, reguliuojantį grybimo parametrus pagal realaus laiko grįžtamąjį duomenis.
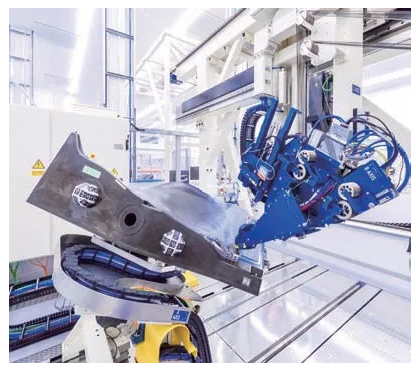
Būdant didžiausiu variklio dalių tipu, lopų gamybos efektyvumas tiesiogiai paveikia visą variklio gamybos efektyvumą, o lopų gamybos kokybė tiesiogiai paveikia variklio našumą ir gyvenimą. Todėl lopų inteligentinis tikslus apdirbimas taps pasaulio šiandienos variklio lopų gamybos kryptimi. Stalčių ir technologinės įrangos tyrime ir kūryboje yra raktas, siekiant realizuoti inteligentinę lopų apdirbimą. Su CNC technologijų vystymusi stalčių intelektinis lygis greitai padidėjo, o jų apdirbimo ir gamybos galios buvo gana stipriai pagerintos. Taigi, intelligentinės technologinės įrangos tyrimas ir kūryba yra svarbi kryptis, siekiant aukštos našumo ir tikslumo aplinkinių lopų apdirbimo. Aukštai intelektualūs CNC stalčiai jungiami su technologine įranga, kad būtų sukurtas intelektualus lopų apdirbimo sistemą (žr. paveikslą 10), kuris realizuoja aukščiausio tikslumo, aukšto našumo ir pritaikomąjį CNC aplinkinių lopų apdirbimą.
 Karštos naujienos
Karštos naujienos 2024-12-31
2024-12-04
2024-12-03
2024-12-05
2024-11-27
2024-11-26
Mūsų profesionali pardavimų komanda laukia jūsų konsultacijos.
 EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 SL
SL
 UK
UK
 VI
VI
 ET
ET
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 GA
GA
 IS
IS






